Что надо знать про двигатель 2С при покупке Тойоты|Слабый мотор
В предыдущей статье мною была приведена информация про слабые места и недостатки дизеля 1С. Следующее поколение двигателей 2С от Тойота Мотор Корпорейшен, казалось бы наоборот, должно быть качественней, ведь опыт корпорации и научно — технический прогресс постоянно развивается. Но к сожалению, про дизельные двигатели линейки 2С в сравнении с 1С ничего хорошего сказать нельзя, а недостатков стало больше. Модели автомобилей Тойота в которых установлены эти двигатели с объемом 2л перечислены ниже:
- Калдина CT190/196/198 с 1992 по 1998 гг., 2С-I4, 2C-TI4;
- Карина CT150 с 1984 по 1988 гг., 2С-T4;
- Карина CT170/176 с 1988 по 1992 гг., 2С-I4;
- Карина CT190/195 с 1992 по 1996 гг., 2С-I4;
- Карина 2 CT150 с 1983 по 1987 гг., 2С-I4;
- Карина 2 CT170 с 1987 по 1992 гг., 2С-I4;
- Карина Е CT190 с 1992 по 1996 гг., 2С-L-I4, 2С-II-I4;
- Корона CT150 с 1983 по 1987 гг.
 , 2C-II-I4, 2C-L-I4, 2C-I4, 2C-T-I4;
, 2C-II-I4, 2C-L-I4, 2C-I4, 2C-T-I4; - Корона CT170/176/177 с 1987 по 1992 гг., 2С-L-I4, 2С-I4, 2С-T-I4;
- Корона CT190/195 с 1992 по 1996 гг., 2C-II-I4, 2C-L-I4,2C-T-I4;
- Литайс/Таун Айс CM26 с 1985 по 1986 гг., 2С-I4, 2С-T-I4-T;
- Литайс CM0/31/36/41 с 1985 по 1992 гг., 2C-I4, 2C-T-I4-T;
- Литайс/Таун Айс CM51/52/55/60/61/65 с 1989 по 1999 гг., 2С-I4, 2С-T-I4-T;
- Литайс/Таун Айс CP21/27/28/36 с 1984 по 1996 гг., 2C-I4, 2C-T-I4-T;
- Литайс/Таун Айс CP41/51 с 1996 по 1989 гг., 2С-I4, 2С-T-I4-T;
- Спринтер CE95 с 1989 по 1991 гг., 2С;
- Спринтер CE100/104/106/108/109 с 1991 по 1998 гг., 2C;
- Спринтер CE110/114 с 1995 по 1998 гг., 2С;
- Авенсис CT220 с 1997 по 2000 гг., 2С-TE;
- Каролла CE110 с 1995 по 2001 гг., 2С-E.
 , 2C-II-I4, 2C-L-I4, 2C-I4, 2C-T-I4;
, 2C-II-I4, 2C-L-I4, 2C-I4, 2C-T-I4;
Все слабые места и недостатки двигателя 1С по наследству достались 2С и дополнительно (см.ниже).
Недостатки двигателя 2С
- Потеря компрессии в двух цилиндрах, в большинстве случаев в 3 и 4 цилиндре;
- Быстрый износ двигателей 2С и 2С-T установленных на микроавтобусах;
- Отсутствие сервисов для регулировки и проблема с деталями к ТНВД с электроникой в случае его ремонта у двигателей 2С-E, 2С-TE.

Более детально о недостатках двигателя 2С…
Потеря компрессии в двух цилиндрах, в большинстве случаев в 3 и 4 цилиндре
Потеря компрессии, как правило в проблемных 3 и 4 цилиндрах двигателей происходит по причине негерметичности воздушных трубок связующих воздушный фильтр с турбиной и с воздушным коллектором. Пыль проникая в через негерметичные места и смешиваясь с маслом и поступая с маслом к поверхности трущихся деталей стачивает их и быстро приводит в негодное состояние. По этой причине быстро выходит из строя цилиндро-поршневая группа, и тарелки впускных клапанов. Соответственно, износ тарелок клапанов увеличивает тепловые зазоры, а компрессия пропадает.
Быстрый износ двигателей 2С и 2С-T установленных на микроавтобусах
Если сказать по простому, то данные моторы не рассчитаны для микроавтобусов, ведь они гораздо тяжелее и больше по габаритам, что увеличивает нагрузки на двигатели. На движках, где ТНВД с электронным управлением эта проблема отсутствует.
На движках, где ТНВД с электронным управлением эта проблема отсутствует.
Отсутствие сервисов для регулировки и проблема с деталями к ТНВД с электроникой в случае его ремонта у двигателей 2С-E, 2С-TE
Конечно ТНВД с электронным управлением принес пользу двигателям:
- снижение расхода топлива;
- уменьшение токсичных выбросов;
- повысилась равномерность работы двигателя;
- двигатели работают тихо.
Но минус в том, что очень редко попадаются сервисы способные проводить диагностику, регулировку подобных ТНВД в соответствии с заданными конструкторами режимами и параметрами. Трудность в том, что нет специалистов такого уровня подготовленности, а также запчастей и технологического оборудования для требуемых работ.
В заключении можно отметить, что у мотора 2С есть недостатки о которых перед покупкой автомобиля сначала надо хорошо подумать, ведь покупать вы будете не новое авто, а побывавшее в пользовании. С другой стороны, если автомобиль правильно эксплуатировали, своевременно осматривали и обслуживали, то вышеописанных проблем не будет.
С другой стороны, если автомобиль правильно эксплуатировали, своевременно осматривали и обслуживали, то вышеописанных проблем не будет.
P.S. Уважаемые владельцы «Тойот» с двигателями 2С! Вы можете прокомментировать о слабых местах и недостатках выявленных вами в личной практике при эксплуатации автомобилей.
Похожие записи:
Двигатель Toyota 2C, Технические Характеристики, Какое Масло Лить, Ремонт Двигателя 2C, Доработки и Тюнинг, Схема Устройства, Рекомендации по Обслуживанию
string(10) "error stat"
string(10) "error stat"
Описание 2C
В 1985 году появился один из худших и проблемных дизельных двигателей компании Toyota — 2C. Он устанавливался абсолютно на все что можно, начиная от микроавтобусов и заканчивая седанами Toyota.
Силовая установка не завоевала положительных рекомендаций, все потому что двигатель имел множество конструктивных недоработок. Казалось бы серия двигателей 1C должна была научить инженеров и дать понять о всех недостатках их дизелей. Но на деле все наоборот двигатели 2С имеют еще больше недостатков.
Но на деле все наоборот двигатели 2С имеют еще больше недостатков.
На микроавтобусах эти моторы подвержены быстрому износу. Они просто не рассчитаны на вес микроавтобуса, поэтому двигатели испытывают серьезные нагрузки, естественно в таких условиях ни один двигатель долго не проживет. Силовые установки серии 2С развивают всего 70 лошадиных сил и 130 Hm крутящего момента, этого очень мало для передвижения минивэна общим весом в 2 тонны.
Двигатели 2С были оснащены турбонаддувом, имели чугунный блок и алюминиевую ГБЦ, которая в процессе эксплуатации страдала больше всего, от термонагруженности и плохого охлаждения она покрывается микротрещинами и больше не может выполнять своей функции. Головка в свою очередь имеет 8 клапанов — по 2 на цилиндр, систему Sohc — распредвал всего один, привод газораспределительного механизма осуществлен ремнем, за которым также нужно пристально следить, ведь двигатели серии 2С гнут клапана.
Чугунный блок двигателя свою роль выполняет достойно и легко поддается капитальному ремонту. В целом компания Toyota произведя эту серию двигателей не учла своих ошибок, а только усугубила свое положение на рынке дизельных установок — у них получился маломощный и не надежный двигатель, имеющий кучу конструкционных недостатков.
Регламент обслуживания 2С
Чтобы продлить жизнь силовой установке требуется проводить планомерные технические работы с двигателем — менять расходники, а также следить за качеством работы двигателя и при необходимости производить ремонт неисправных систем и агрегатов.
Одним из важнейших
расходников является масло, для данной серии двигателей качество масла не так
важно как его количество — важно следить за уровнем масла и при необходимости
доливать его, если уровень масла стать падать слишком быстро, то стоит
задуматься о капремонте, если этого не сделать, то двигатель может уйти в
разнос. Для двигателей 2C прекрасно подойдет масло средней ценовой категории — синтетика или полусинтетика
вязкости 5w-30,
5w-40.
Для двигателей 2C прекрасно подойдет масло средней ценовой категории — синтетика или полусинтетика
вязкости 5w-30,
5w-40.
Регламент технического обслуживания представлен ниже:
- регулировку клапанов требуется производить каждые 30 тысяч километров пробега, иначе клапана прогорят и двигатель откажется запускаться, так как компрессии просто не будет, может быть все иначе, если зазор будет слишком большим, то появятся неприятные стуки доносящиеся из ГБЦ;
- замена всех фильтрующих элементов также важна, ее следует производить каждые 20 тысяч километров, воздушный и топливный фильтры можно использовать как оригинальные, так и аналоговые;
- регулировка форсунок должна быть произведена в соответствии с мануалом раз в 100 тысяч километров;
- ремень ГРМ рекомендуется проверять раз в 20 тысяч километров, его ресурс равен 100 тыс.км., но лучше произвести его замену после 70000 км. пробега, приводные ремни также требуют внимания, следует контролировать их состояние и при необходимости менять.
- замену масла требуется производить каждые 10 тысяч км. пробега.

Обзор неисправностей 2C, способы ремонта
Одним из проблемных узлов силовой установки является головка блока цилиндров, в условиях дикой термонагруженности и плохого охлаждения она нередко обрастает микротрещинами и начинает пропускать газы в систему охлаждения, либо охлаждающая жидкость попадает в масло и образует эмульсию, что приводит к моментальной смерти дизельного агрегата. Ремонту ГБЦ не поддается, единственный вариант найти контрактную, произвести опрессовку и если она в хорошем состоянии, то установить на двигатель.
Потеря компрессии в 3 и 4ом цилиндрах возникает из за попадания пыли в масло. Смешиваясь с маслом пыль попадает на стенки цилиндров и просто стачивает их. В результате чего образуется эллипсность и поршень больше не способен держать давление — оно прорывается в местах стачивания гильзы. Поршневые и маслосъемные кольца тоже моментально страдают, появляется масложор и если он превысит критическую отметку, то масло попадая в цилиндры может пустить двигатель в разнос. Именно поэтому заметив сизый дым из выхлопной трубы следует немедленно произвести капремонт двигателя, если этого не сделать, а продолжить ездить, то вскоре ремонтировать будет уже нечего.
В результате чего образуется эллипсность и поршень больше не способен держать давление — оно прорывается в местах стачивания гильзы. Поршневые и маслосъемные кольца тоже моментально страдают, появляется масложор и если он превысит критическую отметку, то масло попадая в цилиндры может пустить двигатель в разнос. Именно поэтому заметив сизый дым из выхлопной трубы следует немедленно произвести капремонт двигателя, если этого не сделать, а продолжить ездить, то вскоре ремонтировать будет уже нечего.
Двигатели установленные на микроавтобусы изнашивались очень быстро, так как работали в максимально тяжелых условиях — их мощности критически не хватало для того чтобы перемещать двухтонные машины. Но стоит отметить, что двигатели с электронным управлением ТНВД жили намного дольше, чем их собратья с механикой.
Двигатель 2С использует турбину, охлаждение которой реализовано с помощью антифриза, но из за конструктивных недоработок системы охлаждения в ней практически всегда присутствует воздух, в результате воздушных пробок турбина перегревается и испытывает масляное голодание. В результате чего она моментально выходит из строя и хорошо если она просто перестает нагнетать воздух, но иногда случается заброс масла из турбины во впуск в результате попадания масла в цилиндры двигатель может уйти в разнос, что нередко происходит, так как масло является отличным топливом для дизельных установок.
В целом двигатели серии 2C живут досточно долго в легких автомобилях, таких как Toyota Carina. Силовые агрегаты установленные в данных автомобилях нередко проходят 300 тысяч километров без капремонта, естественно при условии того, что все технические работы производятся по регламенту и двигатель работает в умеренных нагрузочных режимах.
Варианты тюнинга 2С
Данная серия двигателей
практически не поддается тюнингу. Лучше не мешать двигателю с такой репутацией
просто работать. Энтузиасты поднимают давление турбины и получают прибавку в
15-20 лошадиных сил, но при этом колоссально страдает ресурс. Вообще тюнингом
данной силовой установки никто не занимается, ее предназначение исправно
работать в седанах и минивэнах.
Список моделей авто, в которые устанавливался
Двигатели серии 2С предназначались для бюджетных седанов и минивэнов компании Toyota, к сожалению маломощные двигатели плохо справляются со своими обязанностями в тяжелых автомобилях, зато в каринах и калдинах мотор прекрасно выполняет свои функции.
Список авто в которые устанавливались двигатели 2С представлен ниже:
Toyota Avensis
Toyota Avensis
(10.1997 — 12.2000)
хэтчбек, 1 поколение, T220
Toyota Avensis
(10.1997 — 12.2000)
универсал, 1 поколение, T220
Toyota Avensis
(10. 1997 — 12.2000)
1997 — 12.2000)
седан, 1 поколение, T220
Toyota Caldina
Toyota Caldina
(11.1992 — 07.2002)
универсал, 1 поколение, T190
Toyota Caldina
(11.1992 — 12.1995)
универсал, 1 поколение, T190
Toyota Caldina
(01.1996 — 08.1997)
рестайлинг, универсал, 1
поколение, T190
Toyota Carina
Toyota Carina
(08.1996 — 07.1998)
седан, 7 поколение, T210
Toyota Carina
(08.1994 — 07.1996)
рестайлинг, седан, 6
поколение, T190
Toyota Carina
(08.1992 — 07.1994)
седан, 6 поколение, T190
Toyota Carina
(05.1990 — 07.1992)
рестайлинг, седан, 5
поколение, T170
Toyota Carina
(05.1990 — 07.1992)
рестайлинг, универсал, 5
поколение, T170
Toyota Carina
(05.1988 — 07.1990)
седан, 5 поколение, T170
Toyota Carina E
Toyota Carina E
(12.1992 — 01.1996)
универсал, 6 поколение, T190
Toyota Carina E
(04.1992 — 03.1996)
хэтчбек, 6 поколение, T190
Toyota Carina E
(04. 1992 — 03.1996)
1992 — 03.1996)
седан, 6 поколение, T190
Toyota Carina E
(04.1996 — 11.1997)
рестайлинг, хэтчбек, 6
поколение, T190
Toyota Carina E
(04.1996 — 11.1997)
рестайлинг, универсал, 6
поколение, T190
Toyota Carina E
(04.1996 — 01.1998)
Toyota Camry
Toyota Camry
(06.1992 — 06.1994)
рестайлинг, седан, 3
поколение, V30
Toyota Camry
(07.1990 — 05.1992)
седан, 3 поколение, V30
Toyota Camry
(08.1986 — 06.1990)
седан, 2 поколение, V20
Toyota Corolla
Европа
Toyota Corolla
(06.1992 — 04.1997)
универсал, 7 поколение, E100
Япония
Toyota Corolla
(09.1991 — 06.2002)
универсал, 7 поколение, E100
Toyota Corolla
(09.1991 — 04.1993)
универсал, 7 поколение, E100
Toyota Corona
Toyota Corona
(02.1994 — 01.1996)
рестайлинг, седан, 10
поколение, T190
Toyota Corona
(11.1989 — 01.1992)
рестайлинг, седан, 9
поколение, T170
Toyota Corona
(12. 1987 — 05.1992)
1987 — 05.1992)
универсал, 9 поколение, T170
Toyota Corona
(12.1987 — 10.1989)
седан, 9 поколение, T170
Toyota Lite Ace
Toyota Lite Ace
(10.1996 — 08.2007)
минивэн, 5 поколение, R40, R50
Toyota Lite Ace
(01.1992 — 07.1995)
минивэн, 4 поколение, R20, R30
Toyota Lite Ace
(08.1988 — 12.1991)
рестайлинг, минивэн, 3
поколение, M30,
M40
Toyota Lite Ace
(09.1985 — 07.1988)
минивэн, 3 поколение, M30, M40
Toyota Lite Ace
(09.1985 — 12.1991)
минивэн, 3 поколение, M30, M40
Toyota Sprinter
Toyota Sprinter
(05.1993 — 04.1995)
рестайлинг, седан, 7 поколение, E100
Toyota Sprinter
(09.1991 — 04.1995)
универсал, 7 поколение, E100
Toyota Sprinter
(06.1991 — 04.1993)
седан, 7 поколение, E100
Toyota Town Ace
Toyota Town Ace
(10.1996 — 01.2008)
минивэн, 3 поколение, R40, R50
Toyota Town Ace
(01.1992 — 09.1996)
3-й рестайлинг, минивэн,
2 поколение, R20, R30
Toyota Master Ace Surf
Toyota Master Ace Surf
(08. 1988 — 12.1991)
1988 — 12.1991)
2-й рестайлинг, минивэн,
2 поколение, R20, R30
Toyota Vista
Toyota Vista
(06.1992 — 06.1994)
рестайлинг, седан, 3
поколение, V30
Toyota Vista
(06.1992 — 06.1994)
рестайлинг, седан, 3
поколение, V30
Toyota Vista
(07.1990 — 05.1992)
седан, 3 поколение, V30
Toyota Vista
(07.1990 — 05.1992)
седан, 3 поколение, V30
Toyota Vista
(08.1988 — 07.1990)
рестайлинг, седан, 2
поколение, V20
Toyota Vista
(08.1988 — 07.1990)
рестайлинг, седан, 2
поколение, V20
Toyota Vista
(08.1986 — 07.1988)
седан, 2 поколение, V20
Перечень модификаций 2C
Модификаций силовой установки было огромное количество:
- 2С-E — самая массовая версия двигателя, обладала мощностью в 74 лошадиные силы, имела механическое управление ТНВД;
- 2C-T — Мотор обладал мощностью а 82-90 л.с., в зависимости от авто на котором был установлен, как и все представители серии 2C был оснащен турбонаддувом;
- 2C-TE — двигатель мощностью 90 лошадиных сил, устанавливался только на Toyota Avensis;
- 2C-TC — силовая установка развивающая мощность в
90 лошадиных сил, обладала разделенной камерой сгорания.

Технические характеристики
| Объем двигателя, куб.см | 1974 |
| Максимальная мощность, л.с. | 70 — 74 |
| Максимальный крутящий момент, Н*м (кг*м) при об./мин. | 127 (13) / 2600 129 (13) / 2800 129 (13) / 3000 132 (13) / 2500 132 (13) / 2800132 (13) / 3000 160 (16) / 2400 167 (17) / 2400 173 (18) / 2600 174 (18) / 2000 177 (18) / 2200177 (18) / 2600 190 (19) / 2600 |
| Используемое топливо | Дизельное топливо |
| Расход топлива, л/100 км | 3.8 — 7.2 |
| Тип двигателя | 4-цилиндровый, SOHC |
| Доп. информация о двигателе | SOHC |
| Выброс CO2, г/км | 170 |
| Диаметр цилиндра, мм | 86 |
| Количество клапанов на цилиндр | 2-4 |
Максимальная мощность,
л. с. (кВт) при об./мин. с. (кВт) при об./мин. | 70 (51) / 4700 72 (53) / 4700 73 (54) / 4300 73 (54) / 4600 73 (54) / 470074 (54) / 4700 82 (60) / 4500 83 (61) / 4000 85 (63) / 4500 88 (65) / 4000 88 (65) / 450091 (67) / 4400 |
| Механизм изменения объёма цилиндров | нет |
| Нагнетатель | В зависимости от
модифи- кации силовой установки |
| Система старт-стоп | нет |
| Степень сжатия | 23 |
| Ход поршня, мм | 85-94 |
Если у вас возникли вопросы — оставляйте их в комментариях под статьей. Мы или наши посетители с радостью ответим на них
технические характеристики, модификации, проблемы, куда установлены
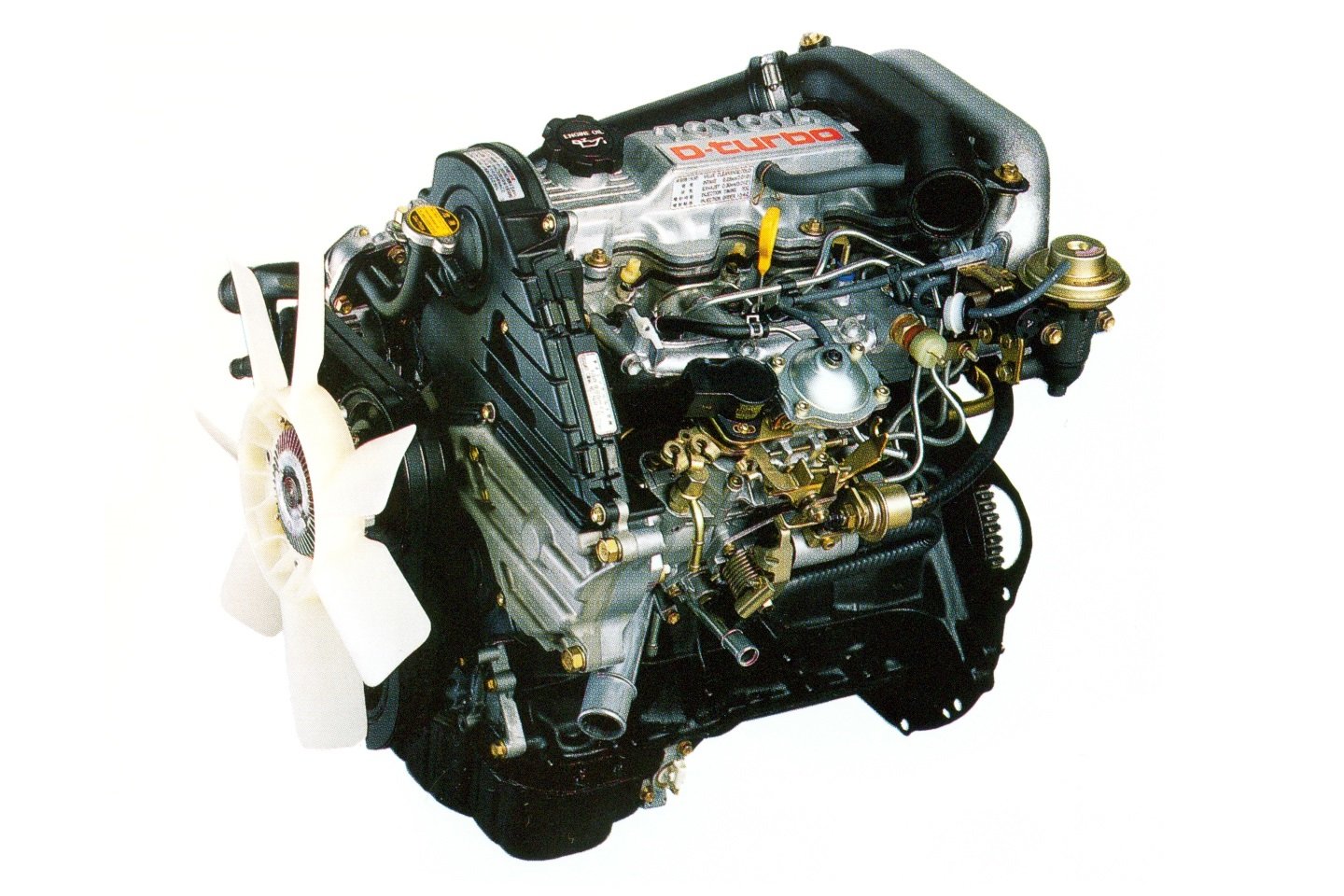
Одна из самых массовых силовых установок Toyota дизельный двигатель 2C-T отлично знаком владельцам «праворуких» автомобилей японского автогиганта. За почти 30 летнюю историю 2C-T приобрел противоречивую репутацию. Однако оставался бессменным флагманом компании с 1986 по 2001 год.
В ногу со временем
Разработка нового поколения дизельных двигателей в середине 80-х годов прошлого века для компании Toyota стала логичным ответом на рост популярности этого типа силовых установок в Европе. Турбированный 4-цилиндровый 2C-T увидел свет в 1986 году в комплектации новой Toyota Camry. Он был разработан специально для тяжелых седанов и микроавтобусов.
Низкий расход топлива и высокий крутящий момент достаточно мощного по тем временам турбодизеля позволили быстро завоевать популярность как на внутреннем рынке Японии так и за его пределами.
Однако в России эти двигатели попадают преимущественно с азиатского рынка. Популярность 2C-T связана с его невысокой ценой на вторичном рынке и хорошей экономичностью. Кроме этого двигатель неприхотлив к горючему и вполне комфортно себя чувствует на российском топливе. К достоинствам 2C-T можно отнести отсутствие электроники, которая значительно упрощает диагностику и ремонт, а также высокий ресурс двигателя при умеренных эксплуатационных нагрузках.
Горячий характер
Для дизелей этой марки характерна проблема с системой с охлаждения, которая только усугубляется на турбированной версии. С одной стороны сама система не справляется с охлаждением двигателя при больших нагрузках. С другой — в системе охлаждения не редко возникают воздушные пробки. В результате частого перегрева двигателя появляются трещины на головке цилиндров, ставшие не приятной особенностью этих агрегатов. Большинству подержанных двигателей этого типа поступающих в Россию требуется ремонт с заменой головки цилиндров.
Контрактный дизель 2C-T
Некоторые специалисты считают, что двигатель перегревается из-за того, что расширительный бочек для охлаждающих жидкостей установлен ниже головки цилиндра. Если поднять его на несколько сантиметров проблема частично будет решена.
Для того чтобы максимально продлить срок жизни 2C-T стоит по максимуму избегать эксплуатации на оборотах выше 3000 об/м. это почти на треть ниже максимального значения. Однако в подобном щадящем режиме 2C-T может проработать невероятно долго.
Однако в подобном щадящем режиме 2C-T может проработать невероятно долго.
Несмотря на свои недостатки, самые первые силовые установки этой модели до сих пор встречаются на российских дорогах, составляя конкуренцию более современным и технологичным агрегатам.
Технические характеристики
2C-T по современным меркам достаточно скромные. Однако двигатель вполне оправдывает возложенные на себя задачи его мощности и крутящего момента хватает и на городское маневрирование и на длительные междугородние переезды. Если конечно не забывать об уязвимой системе охлаждения.
| Объем | 2 л. (1974 см. куб) |
| Количество цилиндров | 4 |
| Количество клапанов | 8 (SOHC) |
| Мощность (лс/об) | 85/4500 |
| Крутящий момент (н-м/об.мин | 235/2600 |
| Степень сжатия | 23 |
| Диаметр/ход поршня (мм) | 86/85 |
| Средний расход топлива | 7-8 л. (в зависимости от модели автомобиля (в зависимости от модели автомобиля |
| Ресурс двигателя | 500 тыс. км |
Модификации
- 2C-TL — двигатель установлен поперечно;
- 2C-TLC — двигатель установлен поперечно, имеет катализатор;
- 2C-TE — оснащался ТНВД с электронным управлением. Устанавливался только на Toyota Avensis для европейского рынка.
2C-T – дизель на все времена
Несмотря на вышеописанные недостатки, двигатель оказался отличным дополнением к тяжелым седанам и микроавтобусам и стоял на вооружении компании 15 лет.
Он устанавливался на:
рестайлинг, универсал, (01.1996 — 08.1997)
седан (08.1986 — 06.1990)
седан (07.1990 — 05.1992) рестайлинг, седан (06.1992 — 06.1994)
седан (08.1996 — 07.1998)
рестайлинг, лифтбек (04.1996 — 12.1997) рестайлинг, универсал (04.1996 — 11.1997) рестайлинг, седан (04.1996 — 01.1998)
седан (01.1996 — 11.1997)
рестайлинг, минивэн (08. 1988 — 12.1991)
минивэн (09.1985 — 07.1988)
1988 — 12.1991)
минивэн (09.1985 — 07.1988)
минивэн (01.1992 — 09.1996)
2-й рестайлинг, минивэн (08.1988 — 12.1991)
3-й рестайлинг, минивэн, (01.1992 — 09.1996) 2-й рестайлинг, минивэн (01.1988 — 09.1991)
рестайлинг, седан (08.1988 — 07.1990) седан (08.1986 — 07.1988)
рестайлинг, седан (06.1992 — 06.1994) седан (07.1990 — 05.1992)
лифтбек (10.1997 — 01.2001) универсал (10.1997 — 01.2001) седан (10.1997 — 01.2001)
Не смотря на то, что двигатель официально снят с производства более 15 лет назад, его популярность остается очень высокой. В частности нередко этот дизель используют для тюнинга внедорожников. Например, российских УАЗов. Так же эти двигатели устанавливают вместо отслуживших срок агрегатов других моделей и производителей. А это значит история легендарного и противоречивого 2C-T еще далеко не окончена.
А это значит история легендарного и противоречивого 2C-T еще далеко не окончена.
Toyota 2C: Характеристики двигателя — AVTO-NINJA
Toyota 2C — это 2,0 л (1974 куб.см.) четырехцилиндровый, четырехтактный двигатель с водяным охлаждением, от Toyota C-семейства, изготовляемого Toyota Motor Corporation с 1983.
Дизельный двигатель 2C имеет чугунный блок цилиндров с отверстиями цилиндров 86,0 и ход поршня 85,0 мм. Степень сжатия составляет 23: 1. Двигатель Toyota 2C имеет головку с одним верхним распределительным валом (SOHC) и 2 клапана на цилиндр (всего 8).
Этот двигатель был доступен в следующих модификациях:
- 2C — продольная версия. Этот двигатель производит 73 л.с. (54 кВт; 72 л.с.) при 4700 об/мин лошадиных сил и 132 Н · м (13,5 кг · м) при 3000 об/мин крутящего момента.
- 2C-L — это поперечно установленная версия 2C.
- 2C-E — это версия EFI для двигателя 2C.
- 2C-T, 2C-TL, 2C-TLC — версия с турбонаддувом. Он вырабатывает 86 л.с. (63 кВт; 85 л.с.) при 4500 об/мин выходной мощности и 173 Н · м (17,6 кг · м) при 2600 об/мин крутящего момента.
- 2C-TE — турбокомпрессорная версия с EFI.
 Он вырабатывает 86 л.с. (63 кВт; 85 л.с.) при 4500 об/мин выходной мощности и 173 Н · м (17,6 кг · м) при 2600 об/мин крутящего момента.
Он вырабатывает 86 л.с. (63 кВт; 85 л.с.) при 4500 об/мин выходной мощности и 173 Н · м (17,6 кг · м) при 2600 об/мин крутящего момента.Разбивка кода двигателя 2C выглядит следующим образом:
- 2 — 2-й двигатель поколения
- C — семейство двигателей
| Характеристики двигателя 2С | |
|---|---|
| Код двигателя | 2С |
| Вид | Прямо-4, вертикальный |
| Тип топлива | дизель |
| Годы производства | 1983- |
| Объём | 2,0 л, 1 974 куб. См |
| Топливная система | механический |
| Турбина | — |
| Лошадиные силы | 2C: 73 PS (54 кВт; 72 л.с.) при 4700 об/мин. 2C-TL : 86 л.с. (63 кВт; 85 л.с.) при 4500 об/мин |
| Крутящий момент | 2C: 132 Н · м (13,5 кг · м) при 3000 об/мин. 2C-TL : 173 Н · м (17,6 кг · м) при 2600 об/мин. |
| Порядок работы цилиндров | 1-3-4-2 |
| Размеры (Д × В × Ш) | — |
| Вес | — |
Блок цилиндров 2C
Блок цилиндров изготовлен из чугуна. Коленчатый вал поддерживается 5 подшипниками. Благодаря внутреннему диаметру цилиндра 86,0 и ходу поршня 85,0 мм двигатель 2C имеет рабочий объем 1974 куб.см. Степень сжатия составляет 23: 1.
| Блок цилиндров | |
|---|---|
| Сплав | Чугун |
| Коэффициент сжатия | 23:1 |
| Диаметр цилиндра | 86,0 |
| Ход поршня | 85,0 |
| Поршневые кольца: компрессия/масло | 2/1 |
| Коренные подшипники | 5 |
| Внутренний диаметр цилиндра | 86. 000-86.030 000-86.030 |
| Диаметр юбки поршня | 85,950-85,980 |
| Кольцевой зазор поршневого кольца | верхний 0,270-0,540 |
| второй 0,250-0,520 | |
| масло 0,200-0,820 | |
| Диаметр шейки коленвала | 27.000-27.012 |
| Диаметр шатуна | 50,488-50,500 |
Процедура затяжки крышки коренных подшипников и характеристики крутящего момента:
● 103 Нм; 10,5 кг · м
После закрепления болтов крышек подшипников убедитесь, что коленчатый вал плавно вращается рукой.
Гайка шатуна
● 64 Нм; 6,5 кг · м
Болт шкива коленчатого вала
● 98 Нм; 10,0 кг · м
Болты крепления пластины привода (A / T)
● 74 Нм; 7,5 кг · м
Крепежные болты маховика (M / T)
● 88 Нм; 9,0 кг · м
ГБЦ 2C
| ГБЦ | |
|---|---|
| Тип ГРМ | SOHC |
| Клапаны | 8 (2 клапана на цилиндр) |
| Скорость впуска/выпуска | — |
| Длина клапана | Впускных 105,70 Выпускных 105,35 |
| Диаметр штока впускного клапана: | 7,975-7,990 |
| Диаметр штока выпускных клапанов: | 7,960-7,975 |
| Длина пружины клапана свободная: | 47,5 |
| Диаметр шейки распредвала: | 27,979-27,995 |
| Высота кулачка распредвала (впуск): | 2C: 46,725-46,875 2C-T: 46,325-46,475 |
| Высота кулачка распредвала (выпуск): | 47,335–47,485 |
Процедура затяжки головки и характеристики крутящего момента:
- Шаг 1 : 44 Нм; 4,5 кг · м
- Шаг 2. Поверните все болты на 90 °
- Шаг 3. Поверните все болты еще на 90 °.
 Поверните все болты на 90 °
Поверните все болты на 90 °| Зазоры клапанов | |
|---|---|
| Впускной клапан | 0,20-0,30 |
| Выпускной клапан | 0,25–0,35 |
| Степень сжатия | |
|---|---|
| Стандарт | 30,0 кг / м 2 |
| Масло в двигатель 2С | |
|---|---|
| Масло в двигатель | 10W-30 или 5W-30 («CC», «CD») |
| API типа масла | — |
| Сколько масла в двигателе, л | С заменой масляного фильтра: 4,3-4,5 л |
| Без замены масляного фильтра: 3,8 л | |
| Замена масла проводится, км | — |
| Двигатель 2С устанавливается в: | |
|---|---|
| Модель | Годы выпуска |
| Toyota Caldina (CT190/196/198) | 1992-1998 |
| Toyota Carina (CT150/170/176/CT190/195) | 1984-1996 |
| Toyota Carina II (CT150/170) | 1983-1982 |
| Toyota Carina E (CT190) | 1992-1996 |
| Toyota Corolla (CE95/100/104/106/108/109/110/114) | 1989-2001 |
| Toyota Corolla (Altis) (CE120) | 2001-2004 |
| Toyota Corona (CT141/CT150/CT170/176/177/CT190/195) | 1983-1996 |
| Toyota Deliboy (CXC10 ) | 1991-1994 |
| Toyota LiteAce / TownAce | 1985-1999 |
| Toyota Sprinter (CE95/100/104/106/108/109/110/114) | 1989-1998 |
| 2C-E | |
| Toyota Corolla (CE110) | 1995-2001 |
| 2C-T, 2C-TL, 2C-TLC | |
| Toyota Caldina (CT190 ) | 1994-1997 |
| Toyota Carina (CT210/215) | 1996-1998 |
| Toyota Carina E (CT190) | 1996-1997 |
| Toyota Avensis (CT220) | 1997-2000 |
| Toyota Camry (CV11/20/30) | 1995-1994 |
| Toyota Corona (CT190/CT210/215) | 1996-1997 |
| Toyota Vista (CV11/20/30) | 1995-1994 |
| Toyota LiteAce / TownAce (CM30/40, CR21/28/30/37) | 1984-1992 |
| 2C-TE | |
| Toyota Avensis (CT220) | 1997-2000 |
Денис — специалист в сфере автомобилей. Он имеет 5-летний опыт работы на СТО и пишет про новости в мире автомобилей. Теперь он делится своими знаниями с людьми, рассказывает про устройство и ремонт современных авто.
Он имеет 5-летний опыт работы на СТО и пишет про новости в мире автомобилей. Теперь он делится своими знаниями с людьми, рассказывает про устройство и ремонт современных авто.
| Toyota CALDINA (ST19_, ET19_, CT19_, AT19_) | 06.1994 | 09.1997 |
| Toyota CARINA E Sportswagon (_T19_) | 01.1993 | 01.1996 |
| Toyota CARINA E Наклонная задняя часть (_T19_) | 04.1992 | 01.1996 |
| Toyota CARINA E седан (_T19_) | 08.1992 | 01.1996 |
| Toyota CARINA II седан (_T17_) | 03.1988 | 06.1992 |
| Toyota COROLLA Liftback (_E10_) | 07.1992 | 04.1997 |
| Toyota COROLLA SECCA Наклонная задняя часть (_E10_, AE102) | 07.1992 | 04.1997 |
| Toyota COROLLA Wagon (_E10_) | 07.1992 | 04.1997 |
| Toyota COROLLA седан (_E10_) | 07.1992 | 04. 1997 1997 |
| Toyota CORONA Наклонная задняя часть | 12.1987 | 01.1992 |
| Toyota CORONA седан | 10.1997 | 09.2003 |
| Toyota CORONA седан | 12.1987 | 01.1992 |
| Toyota CORONA седан | 01.1984 | 08.1988 |
| Toyota DELIBOY автобус (KXC1_, CXC1_) | 10.1989 | 10.1995 |
| Toyota LITEACE автобус (CM30_G, KM30_G) | 08.1988 | 01.1992 |
| Toyota LITEACE автобус (_R2_LG) | 01.1992 | 05.1994 |
| Toyota LITEACE фургон (CM3_V, KM3_V) | 08.1988 | 01.1992 |
| Toyota LITEACE фургон (_R2__V) | 01.1992 | 05.1994 |
| Toyota MASTER ACE SURF автобус | 02.1985 | 10.1993 |
| Toyota MODELL F автобус (_R2_, 31) | 04.1985 | 08.1988 |
| Toyota SPRINTER Наклонная задняя часть | 04.1995 | 11.2000 |
| Toyota SPRINTER седан | 04. 1995 1995 | 11.2000 |
| Toyota TOWN ACE автобус | 01.1992 | 04.1995 |
| Toyota TOWN ACE фургон | 01.1992 | 04.1995 |
История двигателя В-2 — журнал За рулем
Под термином «оружие Победы» обычно понимают самолеты, танки, артиллерийские установки, иногда стрелковое вооружение, дошедшее до Берлина. Менее значимые разработки упоминают реже, а ведь они тоже прошли всю войну и внесли свой важный вклад. Например, дизель В-2, без которого был бы невозможен танк Т-34.
Т-34
Материалы по теме
К военным и стратегическим изделиям, как известно, требования выносят более суровые, чем для «штатской» техники. Поскольку реальный срок их службы зачастую превышает лет тридцать — не только в России, но и в армиях большинства стран.Если речь о танковых моторах, они, естественно, должны быть надежными, нетребовательными к качеству топлива, удобными для обслуживания и некоторых видов ремонта в экстремальных условиях, с достаточным по военным меркам ресурсом. И при этом исправно выдавать базовые характеристики. Подход к конструированию таких двигателей особенный. И результат, как правило, достойный. Но то, что произошло с дизелем В-2, — случай феноменальный.
И при этом исправно выдавать базовые характеристики. Подход к конструированию таких двигателей особенный. И результат, как правило, достойный. Но то, что произошло с дизелем В-2, — случай феноменальный.
Мучительное рождение
Его жизнь началась на Харьковском паровозостроительном заводе им. Коминтерна, конструкторский отдел которого в 1931 году получил госзаказ на быстроходный дизель для танков. И сразу был переименован в дизельный отдел. В задании оговаривалась мощность 300 л.с. при 1600 об/мин, при том что у типичных дизелей того времени рабочая частота вращения коленвала не превышала 250 об/мин.
Поскольку на заводе раньше ничем подобным не занимались, то начали разработку издалека, с обсуждения схемы — рядной, V-образной или звездообразной. Остановились на конфигурации V12 с водяным охлаждением, пуском от электростартера и топливной аппаратурой Bosch — с дальнейшим переходом на полностью отечественную, которую также предстояло создать с нуля.
Сначала построили одноцилиндровый двигатель, потом двухцилиндровую секцию — и долго ее отлаживали, добившись 70 л. с. при 1700 об/мин и удельной массы 2 кг/л.с. Рекордно малая удельная масса также была оговорена в задании. В 1933-м работоспособный, но недоведенный V12 прошел стендовые испытания, где непрестанно ломался, страшно дымил и сильно вибрировал.
с. при 1700 об/мин и удельной массы 2 кг/л.с. Рекордно малая удельная масса также была оговорена в задании. В 1933-м работоспособный, но недоведенный V12 прошел стендовые испытания, где непрестанно ломался, страшно дымил и сильно вибрировал.
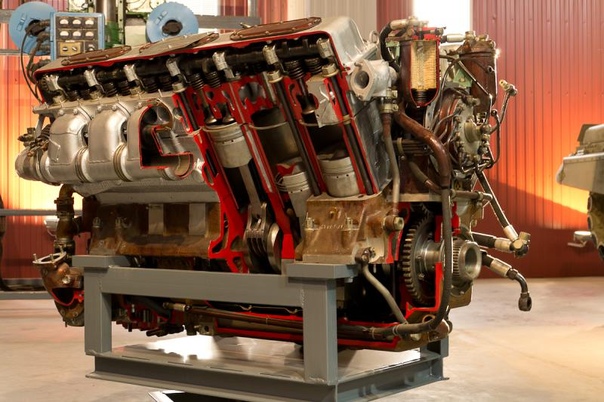
Двигатель В-2
Двигатель В-2 в первоначальном виде провел на массовой военной службе более 20 лет. Отдельные экземпляры на ходу до сих пор. Еще несколько обрели покой в различных музеях.Двигатель В-2 в первоначальном виде провел на массовой военной службе более 20 лет. Отдельные экземпляры на ходу до сих пор. Еще несколько обрели покой в различных музеях.
Испытательный танк БТ-5, оснащенный таким мотором, долго не мог доехать до полигона. То картер трескался, то подшипники коленвала разрушались, то еще что-то, причем для решения многих проблем требовалось создать новые технологии и новые материалы — прежде всего, сорта стали и алюминиевых сплавов. И закупить новое оборудование за рубежом.
Материалы по теме
Тем не менее в 1935-м танки с такими дизелями представили правительственной комиссии, на ХПЗ возвели дополнительные цеха для выпуска моторов — «дизельный отдел» преобразовывался в опытный завод. В процессе доводки мотора учитывалось второстепенное его предназначение — возможность использования на самолетах. Уже в 1936-м самолет Р-5 с дизелем БД-2А (быстроходный дизель второй авиационный) поднимался в воздух, но этот мотор в авиации так и не был востребован — в частности, из-за появления более подходящих агрегатов, созданных профильными институтами в эти же годы.
В процессе доводки мотора учитывалось второстепенное его предназначение — возможность использования на самолетах. Уже в 1936-м самолет Р-5 с дизелем БД-2А (быстроходный дизель второй авиационный) поднимался в воздух, но этот мотор в авиации так и не был востребован — в частности, из-за появления более подходящих агрегатов, созданных профильными институтами в эти же годы.В главном, танковом направлении дело продвигалось медленно и тяжко. Дизель по-прежнему жрал слишком много масла и топлива. Некоторые детали регулярно ломались, а слишком дымный выхлоп демаскировал машину, что особо не нравилось заказчикам. Команду разработчиков усилили военными инженерами.
В 1937-м двигатель получил название В-2, под которым он и вошел в мировую историю. А команду усилили еще раз, ведущими инженерами Центрального института авиационных моторов. Часть технических проблем доверили Украинскому институту авиадвигателестроения (позже он был присоединен к заводу), пришедшему к выводу, что необходимо повышать точность изготовления и обработки деталей. Собственный 12-плунжерный топливный насос также требовал доводки.
Собственный 12-плунжерный топливный насос также требовал доводки.
двигатель В-55В
580-сильный двигатель В-55В применялся на танках Т-62, производимых с 1961 по 1975 год. Всего выпущено порядка 20 000 машин — самих танков и различной техники, созданной на их базе.580-сильный двигатель В-55В применялся на танках Т-62, производимых с 1961 по 1975 год. Всего выпущено порядка 20 000 машин — самих танков и различной техники, созданной на их базе.
На государственных испытаниях 1938 года все три двигателя В-2 второго поколения провалились. У первого заклинило поршень, у второго потрескались цилиндры, у третьего — картер. По итогам испытаний изменили почти все технологические операции, поменяли топливный и масляный насосы. За этим последовали новые испытания и новые изменения. Все это шло параллельно с выявлением «врагов народа» и превращением отдела в огромный Государственный завод №75 по выпуску 10 000 моторов в год, для чего станки завозили и монтировали сотнями.
В 1939-м двигатели, наконец, прошли государственные испытания, получив оценку «хорошо» и одобрение на серийное производство. Которое тоже отлаживали мучительно и долго, что было, впрочем, прервано спешной эвакуацией завода в Челябинск — началась война. Правда, еще до того дизель В-2 прошел боевое крещение в реальных военных действиях, будучи установленным на тяжелые танки КВ.
Материалы по теме
Что получилось?
Получился мотор, про который позже напишут, что с точки зрения конструкции он сильно опередил свое время. А по ряду характеристик еще лет тридцать превосходил аналоги реальных и потенциальных противников. Хотя был далек от совершенства и имел множество направлений для модернизации и улучшений. Некоторые эксперты армейской техники считают, что принципиально новые советские военные дизели, созданные в 1960–1970 годы, уступали дизелям семейства В-2 и были приняты на вооружение лишь по той причине, что становилось уже неприлично не заменить «устаревшее» чем-то современным.
Блок цилиндров и картер — из сплава алюминия с кремнием, поршни — из дюралюминия. Четыре клапана на цилиндр, верхние распредвалы, непосредственный впрыск топлива. Дублированная система пуска — электростартером либо сжатым воздухом из баллонов. Почти все техническое описание — список передовых и инновационных решений того времени.
Двигатель В-46
Двигатель В-46 применен на средних танках Т-72, принятых на вооружение с 1973 года. Благодаря системе наддува снимали 780 л.с. Принципиальных отличий от В-2, прямо сказать, немного.Двигатель В-46 применен на средних танках Т-72, принятых на вооружение с 1973 года. Благодаря системе наддува снимали 780 л.с. Принципиальных отличий от В-2, прямо сказать, немного.
Он оказался сверхлегким, с выдающимся показателем удельной массы, экономичным и мощным, причем мощность легко варьировалась локальным изменением рабочих оборотов коленвала и степени сжатия. Еще до начала войны в постоянном производстве были три версии — 375-, 500- и 600-сильная, для техники разных весовых категорий. Приладив к В-2 систему наддува от авиамотора АМ-38, получили 850 л.с. и немедленно испытали на опытном тяжелом танке КВ-3.
Приладив к В-2 систему наддува от авиамотора АМ-38, получили 850 л.с. и немедленно испытали на опытном тяжелом танке КВ-3.
Дизельный двигатель В-2
А. Протасов, рисунок А. Краснова
Прославленный танковый дизель был создан на Харьковском паровозостроительном заводе (ХПЗ) имени Коминтерна в 1939 г. Мотор, получивший обозначение В-2, устанавливался перед войной на советских лёгких быстроходных колёсно-гусеничных танках БТ-7М, средних танках Т-34 и тяжелых КВ-1 и КВ-2, а также на тяжелом гусеничном артиллерийском тягаче «Ворошиловец». В военное время его ставили на средние танки Т-34, тяжелые KB и ИС, а также на самоходные артиллерийские установки (САУ) на их базе. В послевоенные годы этот двигатель модернизировался, и современные танковые моторы являются его прямыми потомками.
Технические особенности В-2 наглядно демонстрируют пути, которыми развивалась техническая мысль в целом и моторостроение в частности в преддверии Второй мировой войны.
Проектировать этот двигатель начали в дизельном отделе ХПЗ в 1931 г. под руководством начальника отдела К.Ф. Челпана. Активное творческое участие в работе принимали А.К. Башкин, И.С. Бер, Я.Е. Вихман и др. Поскольку опыта разработки танкового быстроходного дизеля не было, они начали его проектирование широким фронтом: прорабатывались три схемы расположения цилиндров – одно- и двухрядного (V-образного), а также звездообразного. Послеобсуждения и оценки каждой схемы отдали предпочтение 12-цилиндровой V-образной конструкции. При этом проектируемый двигатель, получивший первоначальное обозначение БД (быстроходный дизель), был схож с авиационными карбюраторными двигателями М5 и М17Т, устанавливавшимися на лёгких колёсно-гусеничных танках БТ. Это закономерно: предполагалось, что мотор будет выпускаться в танковом и авиационном вариантах.
Разработка велась поэтапно. Сначала создали одноцилиндровый двигатель и проверяли его в работе, а затем изготовили двухцилиндровую секцию, имевшую главный и прицепной шатуны. В 1932 г., добившись её устойчивой работы, приступили к разработке и испытаниям 12-цилиндрового образца, получившего обозначение БД-2 (быстроходный дизель второй), которые были закончены в 1933 г. Осенью 1933 г. БД-2 выдержал первые государственные стендовые испытания и был установлен на лёгком колёсно-гусеничном танке БТ-5. Ходовые испытания дизелей БД-2 на БТ-5 начались в 1934 г. Одновременно продолжалось совершенствование двигателя и устранение обнаруженных недостатков. В марте 1935 г. члены ЦК компартии и правительства ознакомились в Кремле с двумя танками БТ-5 с дизелями БД-2. В том же месяце последовало решение правительства о строительстве при ХПЗ цехов для их изготовления.
В 1932 г., добившись её устойчивой работы, приступили к разработке и испытаниям 12-цилиндрового образца, получившего обозначение БД-2 (быстроходный дизель второй), которые были закончены в 1933 г. Осенью 1933 г. БД-2 выдержал первые государственные стендовые испытания и был установлен на лёгком колёсно-гусеничном танке БТ-5. Ходовые испытания дизелей БД-2 на БТ-5 начались в 1934 г. Одновременно продолжалось совершенствование двигателя и устранение обнаруженных недостатков. В марте 1935 г. члены ЦК компартии и правительства ознакомились в Кремле с двумя танками БТ-5 с дизелями БД-2. В том же месяце последовало решение правительства о строительстве при ХПЗ цехов для их изготовления.
Для оказания технической помощи в Харьков были направлены из Москвы инженеры из Центрального института авиационных моторов (ЦИАМ) М.П. Поддубный, Т.П. Чупахин и другие, имевшие опыт проектирования авиационных дизелей, а также начальник кафедры двигателей Военной академии механизации и моторизации Красной Армии проф. Ю.А. Степанов и его сотрудники.
Руководство подготовкой серийного производства доверили И.Я. Трашутину и Т.П. Чупахину. К концу 1937 г. на испытательный стенд был установлен новый доведённый дизель, получивший к тому времени обозначение В-2. Проведённые в апреле-мае 1938 г. государственные испытания показали, что можно начинать его мелкосерийное производство, которым стал руководить С.Н. Махонин. В 1938 г. на ХПЗ изготовили 50 двигателей В-2, а в январе 1939 г. дизельные цеха ХПЗ отделились и образовали самостоятельный моторостроительный за вод, получивший позднее № 75. Чупахин стал главным конструктором этого завода, а Трашутин – начальником конструкторского бюро. 19 декабря 1939 г. начался крупносерийный выпуск отечественных быстроходных танковых дизелей В-2, принятых в производство распоряжением Комитета обороны вместе с танками Т-34 и КВ.
За разработку двигателя В-2 Т.П. Чупахину была присуждена Сталинская премия, а осенью 1941 г. завод № 75 награжден Орденом Ленина. В то время этот завод был эвакуирован в Челябинск и слился с челябинским Кировским заводом (ЧКЗ). Главным конструктором ЧКЗ по дизельным двигателям назначили И.Я. Трашутина.
Главным конструктором ЧКЗ по дизельным двигателям назначили И.Я. Трашутина.
Необходимо упомянуть и об авиационном варианте В-2А, судьба которого сложилась драматически. К началу серийного производства основной модели самолёт-разведчик, на котором предполагалось устанавливать В-2А, устарел, а переделывать основную модель В-2 в чисто танковую было нецелесообразно. Это потребовало бы дополнительного времени, которого у наших моторостроителей не было: надвигалась Вторая мировая война, и Красной Армии требовались – срочно и в большом количестве – новые танки с противоснарядной бронёй и мощными дизелями.
В-2 так и пошел «на поток» с алюминиевым картером и блоками цилиндров, с длинным носком коленчатого вала и упорным шарикоподшипником, способным передавать усилие от воздушного винта картеру двигателя. Уместно заметить, что самолёт-разведчик Р-5 успешно летал с двигателем В-2А.
Существовала и другая модификация этого двигателя – В-2К, отличавшаяся повышенной до 442 кВт (600 л. с.) мощностью. Увеличение мощности достигалось за счёт повышения степени сжатия на 0,6–1 ед., увеличения частоты вращения коленчатого вала на 200 мин–1 (до 2 000 мин–1) и подачи топлива. Модификация первоначально предназначалась для установки на тяжелых танках KB и изготавливалась на ленинградском Кировском заводе (ЛКЗ) по документации ХПЗ. Массогабаритные показатели по сравнению с базовой моделью не изменились.
В предвоенное время на заводе № 75 были созданы и другие модификации этого двигателя – В-4, В-5, В-6 и другие, максимальная мощность которых находилась в довольно широких пределах – от 221 до 625 кВт (300–850 л.с.), которые предназначались для установки на лёгких, средних и тяжелых танках.
Перед Великой Отечественной войной танковые дизели изготавливались заводом № 75 в Харькове и ЛКЗ в Ленинграде. С началом войны их стал изготавливать Сталинградский тракторный, завод № 76 в Свердловске и ЧКЗ (Челябинск). Однако танковых дизелей не хватало, и в конце 1942 г. в Барнауле срочно построили завод № 77. Всего же эти заводы в 1942 г. изготовили 17 211 шт., в 1943 г. – 22 974 и в 1944 г. – 28 136 дизельных двигателей.
В-2 относился к быстроходным 4-тактным бескомпрессорным, с непосредственным впрыском топлива 12-цилиндровым тепловым машинам жидкостного охлаждения, имеющим Vобразное расположение цилиндров с углом развала 60°.
Картер состоял из верхней и нижней половин, отлитых из силумина, с плоскостью разъёма по оси коленчатого вала. В нижней половине картера имелись два углубления (передний и задний маслозаборники) и передача к масляному и водяному насосам и топливоподкачивающей помпе, крепящихся снаружи картера. К верхней половине картера крепились на анкерных шпильках левый и правый блоки цилиндров вместе с их головками. В корпусе рубашки каждого блока цилиндров, изготовленного из силумина, устанавливались по шесть стальных азотированных мокрых гильз.
В каждой головке цилиндров были два распредвала и по два впускных и выпускных клапана (т. е. по четыре!) на каждый цилиндр. Кулачки распределительных валов действовали на тарелки толкателей, установленных непосредственно на клапанах. Сами валы были полыми, по внутренним сверлениям подводилось масло к их опорам и к тарелкам клапанов. Выпускные клапаны не имели специального охлаждения. Для привода распредвалов использовали вертикальные валы, каждый из которых работал с двумя парами конических шестерён.
е. по четыре!) на каждый цилиндр. Кулачки распределительных валов действовали на тарелки толкателей, установленных непосредственно на клапанах. Сами валы были полыми, по внутренним сверлениям подводилось масло к их опорам и к тарелкам клапанов. Выпускные клапаны не имели специального охлаждения. Для привода распредвалов использовали вертикальные валы, каждый из которых работал с двумя парами конических шестерён.
Коленчатый вал изготавливался из хромоникельвольфрамовой стали и имел восемь коренных и шесть шатунных пустотелых шеек, располагавшихся попарно в трёх плоскостях под углом 120°. Коленчатый вал имел центральный подвод смазки, при котором масло подводилось в полость первой коренной шейки и по двум сверлениям в щеках проходило во все шейки. Развальцованные в выходных отверстиях шатунных шеек медные трубки, выходившие к центру шейки, обеспечивали поступление на трущиеся поверхности центрифугированного масла. Коренные шейки работали в толстостенных стальных вкладышах, залитых тонким слоем свинцовистой бронзы. От осевых перемещений коленвал удерживался упорным шарикоподшипником, установленным между седьмой и восьмой шейками.
От осевых перемещений коленвал удерживался упорным шарикоподшипником, установленным между седьмой и восьмой шейками.
Поршни – штампованные из дюралюминия. На каждом установлены пять чугунных поршневых колец: два верхних компрессионных и три нижних маслосбрасывающих. Поршневые пальцы – стальные, полые, плавающего типа, удерживаемые от осевого перемещения дюралюминиевыми заглушками.
Шатунный механизм состоял из главного и прицепного шатунов. Из-за кинематических особенностей этого механизма ход поршня прицепного шатуна был на 6,7 мм больше, чем у главного, что создавало небольшое (около 7%) различие в степени сжатия в левом и правом рядах цилиндров. Шатуны имели двутавровое сечение. Нижняя головка главного шатуна к верхней его части крепилась с помощью шести шпилек. Шатунные вкладыши были стальными тонкостенными, залитыми свинцовистой бронзой.
Пуск двигателя был дублированным, состоявшим из двух, действующих независимо систем – электрического стартера мощностью 11 кВт (15 л. с.) и пуска сжатым воздухом из баллонов. На некоторых двигателях вместо обычных электростартеров устанавливали инерционные с ручным приводом из боевого отделения танка. Система пуска сжатым воздухом предусматривала наличие распределителя воздуха и пускового автоматического клапана на каждом цилиндре. Максимальное давление воздуха в баллонах составляло 15 МПа (150 кгс/см2), а поступавшего в распределитель – 9 МПа (90 кгс/см2) и минимальное – 3 МПа (30 кгс/см2).
с.) и пуска сжатым воздухом из баллонов. На некоторых двигателях вместо обычных электростартеров устанавливали инерционные с ручным приводом из боевого отделения танка. Система пуска сжатым воздухом предусматривала наличие распределителя воздуха и пускового автоматического клапана на каждом цилиндре. Максимальное давление воздуха в баллонах составляло 15 МПа (150 кгс/см2), а поступавшего в распределитель – 9 МПа (90 кгс/см2) и минимальное – 3 МПа (30 кгс/см2).
Для подкачки топлива под избыточным давлением 0,05–0,07 МПа (0,5–0,7 кгс/см2) в питающую полость насоса высокого давления использовалась помпа коловратного типа. Насос высокого давления НК-1 – рядный 12-плунжерный, с двухрежимным (позже всережимным) регулятором. Форсунки закрытого типа с давлением начала впрыска 20 МПа (200 кгс/см2). В системе топливоподачи имелись также фильтры грубой и тонкой очистки.
Система охлаждения – закрытого типа, рассчитанная на работу под избыточным давлением 0,06–0,08 МПа (0,6–0,8 кгс/см2), при температуре кипения воды 105–107°С. В неё входили два радиатора, центробежный водяной насос, сливной кран, заливной тройник с паровоздушным клапаном, центробежный вентилятор, закрепленный на маховике двигателя, и трубопроводы.
В неё входили два радиатора, центробежный водяной насос, сливной кран, заливной тройник с паровоздушным клапаном, центробежный вентилятор, закрепленный на маховике двигателя, и трубопроводы.
Система смазки – циркуляционная под давлением с сухим картером, состоявшая из трёхсекционного шестерённого насоса, масляного фильтра, двух масляных баков, ручного подкачивающего насоса, уравнительного бачка и трубопроводов. Масляный насос состоял из одной нагнетающей секции и двух откачивающих. Давление масла перед фильтром составляло 0,6–0,9 МПа (6–9 кгс/см2). Основной сорт масла – авиационное МК летом и МЗ зимой.
Анализ параметров двигателей В-2 показывает , что они отличались от карбюраторных намного лучшей топливной экономичностью, большой габаритной длиной и сравнительно небольшой массой. Это объяснялось более совершенным термодинамическим циклом и «близким родством» с авиационными моторами, предусматривавшим длинный носок коленвала и изготовление большого числа деталей из алюминиевых сплавов.
| Двигатель | В-2 | В-2К |
|---|---|---|
| Год выпуска | 1939 | |
| Тип | Танковый, быстроходный, бескомпрессорный, с непосредственным впрыском топлива | |
| Число цилиндров | 12 | |
| Диаметр цилиндров, мм | 150 | |
Ход поршня, мм:
| 180 186,7 | |
| Рабочий объём, л | 38,88 | |
| Степень сжатия | 14 и 15 | 15 и 15,6 |
| Мощность, кВт (л.с.), при мин–1 | 368 (500) при 1 800 | 442 (600) при 2 000 |
| Максимальный крутящий момент Нм (кгс·м) при 1 200 мин–1 | 1 960 (200) | 1 960 (200) |
Минимальный удельный расход топлива, г/кВт·ч, (г/л. с.·ч) с.·ч) | 218 (160) | 231 (170) |
| Габариты, мм | 1 558х856х1 072 | |
| Масса (сухая), кг | 750 | |
Следует сказать несколько слов о мировом приоритете. В отечественной военно-исторической литературе можно встретить мнение, что В-2 был первым в мире танковым дизелем. Это не совсем так. Он входит в «первую тройку» танковых дизелей. Его «соседями» были 6-цилиндровый двигатель жидкостного охлаждения «Заурер» мощностью 81 кВт (110 л.с.), устанавливавшийся с 1935 г. на польском лёгком танке 7ТР, и 6-цилиндровый дизель воздушного охлаждения «Мицубиси» АС 120 VD мощностью 88 кВт (120 л.с.), устанавливавшийся с 1936 г. на японском лёгком танке 2595 «Ха-го».
От своих «соседей» В-2 отличался значительно большей мощностью. Некоторая задержка с началом его серийного производства объяснялась, в том числе и стремлением советских моторостроителей основательно испытать двигатель в войсках, чтобы уменьшить количество «детских болезней». И мотор пользовался заслуженным доверием у советских воинов.
И мотор пользовался заслуженным доверием у советских воинов.
Learning Brushless Motors
http://www.brushlessrcmotor.com/brushless-motor-ratings/
Характеристики бесщеточного двигателя
Характеристики бесщеточного двигателя, кажется, многих сбивают с толку. Я упрощу ситуацию, чтобы вы поняли, как определить, подходит ли бесщеточный двигатель, о котором вы думаете, для вашего радиоуправляемого автомобиля. Характеристики и характеристики бесщеточных двигателей имеют несколько разных названий, и каждое означает что-то свое.
Ниже я объясню различные характеристики бесщеточного двигателя RC, такие как Kv, обороты двигателя, ватты, амперы и т. Д.Я начну с того, что скажу, что не имеет значения, на каком радиоуправляемом транспортном средстве вы управляете, характеристики бесщеточного двигателя применяются ко всем бесщеточным радиоуправляемым двигателям. Я расскажу еще больше о выборе правильного двигателя для вашего RC в зависимости от того, на чем и как вы хотите ездить.
— Что такое Kv?
Общие сведения о номинальных характеристиках бесщеточного двигателя
Я начну с номиналов Kv, почти на всех бесщеточных двигателях где-то на них проставлены значения Kv.У некоторых двигателей номинальная мощность Kv будет указана на корпусе двигателя, у других — на выводах двигателя, а некоторые вы увидите только в технических характеристиках двигателя. Kv — это НЕ «килливольт», как полагают многие.
кВ фактически означает число оборотов двигателя на вольт «без нагрузки». Это означает, что если у вас есть бесщеточный двигатель с рейтингом Kv 2500 Kv, вы должны умножить это число на напряжение вашей батареи, чтобы получить общее число оборотов в минуту. Это число, очевидно, будет меньше, если у вас будет двигатель внутри вашего радиоуправляемого автомобиля, но это та частота вращения, которую двигатель способен достичь.
Пример # 1:
Двигатель 2500 кВ и 2S Li-Po аккумулятор на 7,4 В
(2500 x 7,4) = 18 500 об / мин
тот же двигатель Kv на батарее 3S Li-Po на 11,1 вольт
(2500 x 11,1) = 27750 об / мин
Пример № 2:
Мотор 4800 кВ и аккумулятор 2SLi-Po на 7.4 вольта
(4800 x 7,4) = 35 520 об / мин
тот же двигатель Kv на батарее 3S Li-Po на 11,1 вольт
(4800 x 11,1) = 53 280 об / мин
Общие сведения о номинальных характеристиках бесщеточного двигателя CastleBrushless, КВ, А, Ваттах и т. Д.
Все это означает, что если у вас есть двигатель с более высоким Kv, он будет иметь более высокую конечную скорость, но меньшую эффективность, чем двигатель с более низким Kv при том же напряжении. Таким образом, двигатель с более высоким Kv производит больше тепла и будет работать с меньшим напряжением, чем двигатель с более низким Kv.
Таким образом, двигатель с более высоким Kv производит больше тепла и будет работать с меньшим напряжением, чем двигатель с более низким Kv.
Если у вас есть двигатель с более низким Kv, то он будет иметь более низкую максимальную скорость, но он будет иметь лучший КПД, чем двигатель с более высоким Kv при том же напряжении. Таким образом, двигатель с более низким Kv более эффективен, чем двигатель с более высоким Kv, поэтому он производит меньше тепла. Это означает, что он сможет обрабатывать большее напряжение, а это означает более высокую скорость.
Я обычно предлагаю использовать двигатель, который сбалансирован между двумя крайностями, он даст вам лучшее из обоих миров.Это, конечно, если у вас нет очень конкретной цели для вашего RC. Если вы, как и я, помешаны на скорости, вы можете выбрать более высокий рейтинг Kv. Если перегрев двигателя является проблемой, иногда рекомендуется использовать более низкое значение Kv с батареей более высокого напряжения, чтобы получить тот же эффект.
При использовании Kv для расчета номинальных значений бесщеточного двигателя важно помнить, что каждый из бесщеточного двигателя и ESC будет иметь максимально допустимое входное напряжение (количество элементов батареи).Поэтому, если ваш двигатель или ESC имеют более низкое максимальное напряжение, вы должны использовать это для расчета своих максимальных оборотов. Если вы превысите рекомендованное напряжение, у вас есть большая вероятность, что в вашей установке что-то поджарится.
Вот хорошее видео с Nitro-plane, которое тоже объясняет Kv.
Характеристики бесщеточных двигателей с радиоуправлением — Обороты двигателя
Как и в двигателях с щеточным покрытием, «обороты» двигателя относятся к количеству витков проволоки вокруг каждого из полюсов ротора двигателя. Количество витков проволоки влияет на крутящий момент и скорость двигателя. Чем меньше число оборотов, тем выше максимальная конечная скорость и ниже крутящий момент / ускорение, поочередно большее количество оборотов соответствует более низкой максимальной конечной скорости, но более высокому крутящему моменту / ускорению.
Количество витков проволоки влияет на крутящий момент и скорость двигателя. Чем меньше число оборотов, тем выше максимальная конечная скорость и ниже крутящий момент / ускорение, поочередно большее количество оборотов соответствует более низкой максимальной конечной скорости, но более высокому крутящему моменту / ускорению.
Таким образом, двигатель с меньшим числом оборотов будет иметь меньшее ускорение и крутящий момент, но более высокую максимальную скорость, чем двигатель с более высоким числом оборотов.
Пример: 5T — это более быстрый двигатель (больше оборотов в минуту), чем 12T, но у него меньший крутящий момент.
Это также означает, что двигатель с более высокой номинальной частотой вращения будет иметь большее ускорение и крутящий момент, но меньшую максимальную скорость, чем двигатель с более низкой номинальной частотой вращения.
Пример: 21,5T — это более медленный двигатель (меньше оборотов в минуту), чем 10T, но у него больший крутящий момент.
Еще одна полезная вещь, которую следует понимать в отношении номинальных характеристик бесщеточного двигателя, заключается в том, что иногда на самом деле будет лучше иметь двигатель с меньшим числом оборотов, потому что вашему RC может потребоваться больший крутящий момент для правильной работы.
Хорошими примерами этого являются более тяжелые радиоуправляемые машины, такие как грузовики с радиоуправлением, грузовики с радиоуправлением 4 x 4, грузовики SC, тяжелые самолеты с радиоуправлением, тяжелые лодки с радиоуправлением и автомобили с радиоуправлением, которые предназначены для скорости вне линии.
Вот несколько RC, которые имеют больший крутящий момент:
Traxxas E-Revo, Traxxas Slash, Traxxas Stampede, Traxxas E-Maxx, HPI Savage Flux, HPI Vorza Flux и практически любой RC, который вам нужен вне линейной скорости.
Remember Torque — огромная помощь в прыжках!
Имейте в виду, что у многих регуляторов скорости вращения двигателя есть ограничение, даже у некоторых бесщеточных регуляторов скорости есть ограничение. Обратите на это особое внимание при выборе комбинации ESC и бесщеточного двигателя. Если вы попытаетесь использовать двигатель, который не соответствует характеристикам бесщеточного двигателя вашего ESC, то вы в конечном итоге сожжете свой ESC.
Обратите на это особое внимание при выборе комбинации ESC и бесщеточного двигателя. Если вы попытаетесь использовать двигатель, который не соответствует характеристикам бесщеточного двигателя вашего ESC, то вы в конечном итоге сожжете свой ESC.
Характеристики бесколлекторных двигателей с дистанционным управлением — номинальный ток / амперы
Максимальный номинальный ток относится к максимальной величине тока, с которой двигатель может безопасно работать. Этот ток измеряется в амперах. Номинальный постоянный ток двигателя — это ток, с которым двигатель может безопасно работать в течение длительного периода времени.
Обычно расчетный номинальный ток двигателя можно найти в заводских спецификациях. Однако фактический ток, который потребляет бесщеточный двигатель, зависит от нескольких факторов, номинального значения Kv, напряжения батарей, веса радиоуправляемого автомобиля и передаточного числа или размера опоры.
Все они используются, потому что чем тяжелее двигатель должен работать, чтобы достичь своих максимальных оборотов / максимальной скорости, тем выше будет потребление усилителя. Вот почему это отличная идея — найти регулятор скорости вращения, номинальный ток которого выше, чем у вашего двигателя, по крайней мере, на 20%.Это будет хорошая подушка безопасности, чтобы не сжечь бесщеточную электростанцию.
Номинальные параметры бесщеточного двигателя — Ватты = мощность в лошадиных силах
Вт — это номинальная мощность или эквивалент мощности вашего бесщеточного двигателя с радиоуправлением.
(кстати, требуется 746 Вт, чтобы равняться одной лошадиной силы, небольшая информация).
Вт равняется амперам, умноженным на напряжение вашей батареи, или (амперы x вольт).
В спецификации вашего бесщеточного двигателя должна быть указана мощность, например, «180 Вт».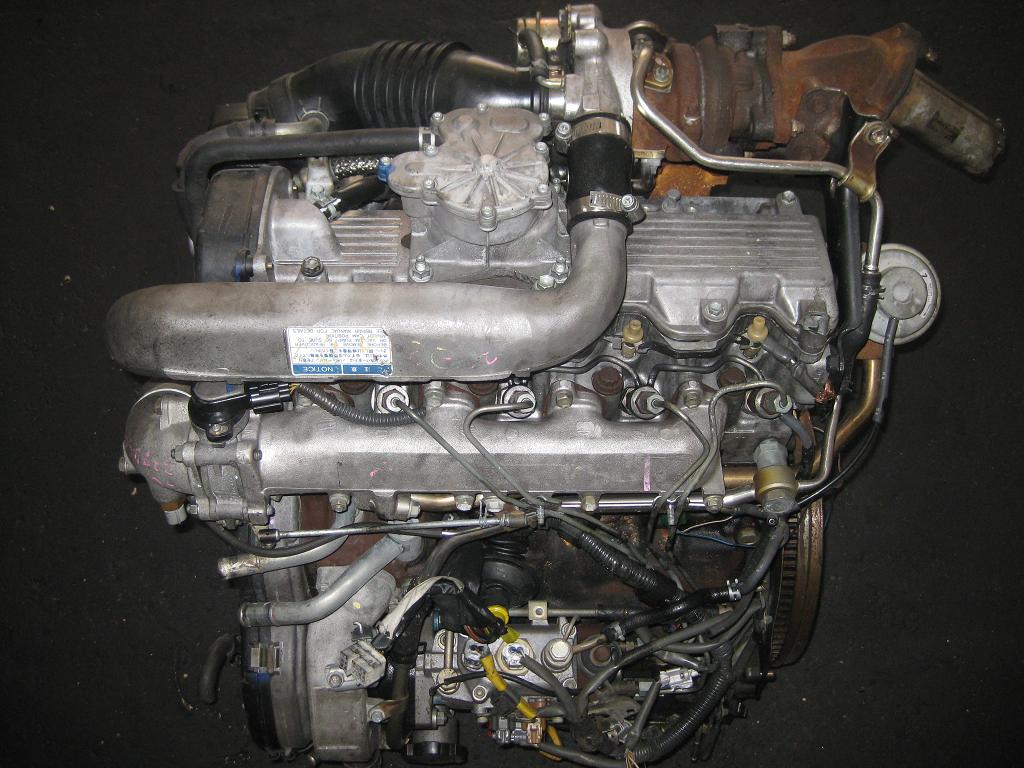 Это означает, что это количество «лошадиных сил», которое он должен производить безопасно. Работа с чем-либо выше этого рейтинга может привести к повреждению вашего двигателя, особенно в течение длительного периода времени.
Это означает, что это количество «лошадиных сил», которое он должен производить безопасно. Работа с чем-либо выше этого рейтинга может привести к повреждению вашего двигателя, особенно в течение длительного периода времени.
У двигателя также будет коэффициент полезного действия, для бесщеточного он будет около 80-90%. Таким образом, если ваша батарея снабжает ESC мощностью 180 Вт, то ваш двигатель будет производить только около 85% от этой мощности или (180 x.85) = 153 Вт.
Остальная мощность превращается в тепло, поэтому в этом примере будет (180 — 153) = 27 Вт тепла, исходящего от двигателя. Но ведь это всего 27 ватт, верно? Просто имейте в виду, что некоторые паяльники потребляют всего 25 Вт, и этого достаточно, чтобы расплавить припой, так что даже такая большая мощность может повредить.
Тепло — враг вашей установки, и вы хотите попытаться устранить все возможное тепло.
Более холодный двигатель доставит вам гораздо меньше хлопот. Чтобы уменьшить нагрев, вы можете изменить размер редуктора или стойки, использовать более эффективный двигатель, снизить напряжение или ток или попробовать радиатор двигателя и вентилятор двигателя.
Чтобы уменьшить нагрев, вы можете изменить размер редуктора или стойки, использовать более эффективный двигатель, снизить напряжение или ток или попробовать радиатор двигателя и вентилятор двигателя.
Более эффективные двигатели обычно стоят дороже, и все, что вы измените, приведет к снижению мощности. Итак, большинство людей пробуют вариант с радиатором и вентилятором, потому что, давайте посмотрим правде в глаза, никто не хочет отказываться от мощности в своей настройке RC, верно?
Если ваш двигатель будет работать в «горячем» состоянии, радиаторы и вентиляторы помогут отводить тепло от вашего двигателя намного быстрее и продлят их работу.Это не идеальное решение, но оно точно поможет и не повредит.
Я буду добавлять дополнительную полезную информацию на свой сайт так быстро, как только смогу, поэтому, если у вас еще остались вопросы, загляните сюда. Или вы можете написать мне, если хотите, и я отвечу вам как можно быстрее.
Этот адрес электронной почты защищен от спам-ботов. У вас должен быть включен JavaScript для просмотра.
10 лучших бесщеточных двигателей, которые можно купить в Интернете [обновлено в 2021 году]
Бесщеточные двигатели постоянного тока используются в самолетах и наземных транспортных средствах.Этот двигатель работает эффективно с высокой удельной мощностью за счет меньшего шума и требует меньшего обслуживания, чем щеточные двигатели постоянного тока. Для сборки ротора используются постоянные магниты. Он похож на двигатель переменного тока с постоянным числом оборотов и может производиться серийно.
Прежде чем выбирать бесщеточный двигатель, нужно помнить об этих двух основных моментах.
- Размер двигателя — В основном производители используют стандартную схему именования двигателей из 4-значного числа. Например, двигатель с названием 2205, в котором первые 2 цифры представляют диаметр статора (в мм). Последние 2 цифры обозначают высоту (в мм). Итак, разумно выбирайте размер двигателя, который требуется для вашего проекта.
- Постоянная скорости и оборотов — Скорость двигателя взаимосвязана со скоростью, с которой вам нужен самолет или игрушка. Итак, чтобы сравнить скорость двигателя, вам нужно найти номер KV. Этот киловольт равен оборотам на вольт. Он объясняет, сколько раз двигатель повернется на каждый вольт. Если напряжение увеличивается, двигатель будет быстро вращаться.
 Последние 2 цифры обозначают высоту (в мм). Итак, разумно выбирайте размер двигателя, который требуется для вашего проекта.
Последние 2 цифры обозначают высоту (в мм). Итак, разумно выбирайте размер двигателя, который требуется для вашего проекта.Помимо этих двух ключевых факторов, покупатель должен учитывать различные факторы, такие как размер обмотки, дуговые магниты, валы двигателя и т. Д.которые четко упомянуты в приведенном ниже «Руководстве по покупке» . Кроме того, мы разработали несколько самых продаваемых бесщеточных двигателей. Просто просмотрите их и выберите свои лучшие бесщеточные двигатели постоянного тока в соответствии с вашими требованиями.
Лучшие бесщеточные двигатели 10 лучших бесщеточных двигателей. Обзоры 1. Бесщеточная система питания Traxxas
Обзоры 1. Бесщеточная система питания Traxxas НАЖМИТЕ ЗДЕСЬ ДЛЯ ЦЕНЫ
9 First0008 Прочтите отзывы клиентов здесь7 9 is двигатель Traxxas 3350R Velineon VXL -3s Brushless Power System.Это отличное обновление по сравнению с машинами Traxxas в масштабе 1/10, а также отличная выходная мощность.В нем используются неодимовые магниты на сверхвысокотемпературной основе, а также высокоскоростные шарикоподшипники и прецизионно сбалансированный ротор. Это дает ему высокую мощность и очень долгий срок службы с высокой эффективностью.
Низкие затраты на обслуживание, уникальное синее анодирование и мощность 3500 кВ делают его отличным центральным элементом вашего робота или автомобиля.
Подробные характеристики
- 4-полюсный двигатель с номинальным напряжением 3500 об / мин / В
- Монтажная пластина регулятора скорости
- ESC имеет 3 профиля движения: от спортивного, гоночного до тренировочного.
- Ограничивает дроссельную заслонку до 50% для новых драйверов
- В нее интегрировано двухступенчатое обнаружение низкого напряжения для использования батареи
- Большой крутящий момент обеспечивается благодаря неодимовым магнитам, чувствительным к высоким температурам Разъем для лучшей и простой разработки

Что нам понравилось в нем
- Водонепроницаемый инновационный дизайн
- Высоко оценены и оценены
- Также имеется дополнительный охлаждающий вентилятор, который вы можете приобрести для эффективной работы
Вещи, которые мы не делали не нравится
- Некоторые незначительные функциональные проблемы в некоторых частях
Купить сейчас на Amazon
2.Бесщеточный двигатель IflightНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет бесщеточный двигатель от iFlight, состоящий из 4 частей. IFlight XING-E 2207 — это бесщеточный двигатель 6S, созданный для гоночного дрона FPV размером 160 мм или микроквадрокоптера.
IFlight XING-E 2207 — это бесщеточный двигатель 6S, созданный для гоночного дрона FPV размером 160 мм или микроквадрокоптера.
Большая мощность, большая тяга при минимальном весе, прочная конструкция и использование высококачественных материалов в конструкции делают iFlight XING идеальным зверьком в производительности.
Эти двигатели имеют высококачественные жаростойкие обмотки на основе магнитов N52H.Их нескользящая конструкция делает гребной винт идеальным для увеличения трения при контакте и, таким образом, повышения общей долговечности.
Подробные спецификации
- Динамически сбалансированные, устойчивые к раздавливанию демпфирующие подшипники и очень эффективно устраняют все вибрации.
- Стальной вал длиной 4 мм с очень высокой прочностью
- Защищенные провода двигателя
- Электромагнитно согласованные магниты и статоры
- Подшипники NSK из Японии
- Магниты дуги N52H
- Основание и раструб изготовлены из алюминия 7075
- Подходит для рамы FPV 160 мм
Что нам в нем понравилось
- Поставляется с несколькими отверстиями для отвода тепла, которые не нагружают дрон из-за тепла
- Поддерживает 6S
- Обмотки с высокой термостойкостью
Что нам в нем не понравилось
Купить сейчас на Amazon
3. Бесщеточный двигатель Crazepony
Бесщеточный двигатель Crazepony НАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Еще один набор бесщеточных двигателей для гоночных дронов с дистанционным управлением, Crazepony Emax ECO 2207 — это пакет из четырех; Бесщеточные двигатели 1700 кВ 3-6С.
Благодаря подшипникам диаметром 9 мм, многожильным катушкам и полому валу двигатели отличаются долговечностью. Их новаторский дизайн говорит о высокой стоимости двигателя и, что самое главное, о доступности.
Несмотря на то, что двигатель долговечен, он также имеет легкий вес, сохраняя при этом свой класс. В двигателе используется высокоточный алюминий аэрокосмического класса, а также усиленный полый стальной вал размером 9 мм x 4 мм.
Подробные спецификации
- Аэрокосмические алюминиевые подшипники 9 мм x 4 мм
- Номинальное напряжение 1700 об / мин / кВ
- Длина 32,6 мм и диаметр 27,45 мм
- Поставляется с каркасом 12N14P
- от 3 до 6 сек.
- Пропеллер размером от 5 до 5 дюймов.5 дюймов
- Вес без силиконовой проволоки составляет всего 31,5 грамма
- Двойное анодирование
- Многослойная медная обмотка
- Стальной вал с отверстиями 16 мм x 16 мм и,
- 115 мм 20 AWG Силиконовый провод

Что нам понравилось в нем
- Многожильная технология, которая уравновешивает скорость, мощность и контроль
- Используется медный сплав, разработанный EMAX, так что электроны будут течь более свободно и эффективно при необходимости
- Инновационный дизайн и высокая производительность
Что нам в нем не понравилось
- Ничего особенного, чтобы упоминать
Купить сейчас на Amazon
4.Бесколлекторные двигатели BetafpvНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
BETAFPV — еще один набор бесщеточных двигателей для микрокоптеров, который поставляется в упаковке по 4 штуки. Он также широко используется во многих других проектах DIY.
Он также широко используется во многих других проектах DIY.
Разработанный для работы с большинством дронов модели 3S whoop, BETAFPV больше рекомендуется для квадрокоптеров модели Beta 75X.
Очень легкий вес, двигатели также имеют небольшие размеры и не сильно увеличивают конечный вес вашего дрона.Благодаря специальной липо-аккумуляторной батарее 3S двигатели работают на высоких скоростях и придают вашему дрону мощный взлет и скорость движения.
Подробные спецификации:
- Весит около 3,5 граммов на штуку
- Каждая часть имеет размер 13,5 дюймов в длину и 16,3 мм в ширину.
- Высота около 14 мм.
- Имеет трехконтактный штекер Micro JST 1.25, упрощающий установку.
- Подходит для больших пропеллеров от 1,2 до 2 дюймов.К ним относятся винты 1735, 1935, 2030 и 3020.
- Толстый кабель, который не сломается легко
- Beta 75X Frame
- Длина вала 1,5 мм
- Диаметр отверстий для крепления двигателя составляет около 8,5 мм
- Номинальное напряжение 8000 об / мин / кВ при частоте вращения
Что нам понравилось об этом
- Очень большое номинальное значение частоты вращения / напряжения.
- Поставляется с более длинными проводами двигателя, что делает его идеальным для дронов с зубочистками
- Отличное качество сборки
- Маленький и легкий

Что нам не понравилось в нем
- Не совсем универсальная совместимость .
Купите сейчас на Amazon
5. Бесщеточный двигатель HglrcНАЖМИТЕ ЗДЕСЬ ДЛЯ ЦЕНЫ
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет комплект бесщеточных двигателей HGLRC. HGLRC Blue 1407 — это набор из 4 бесколлекторных двигателей, созданный для квадрокоптеров гоночных дронов.
Обладая очень интересной цветовой схемой, двигатели синего цвета (также доступны в пурпурной цветовой гамме) имеют умеренное номинальное напряжение, но поддерживают батареи как 3S, так и 4S.
Двигатели отличаются высокой прочностью и изготовлены из валов из нержавеющей стали. Колокол двигателя может всасывать холодный воздух через змеевик и основание, а затем позволять двигателю раскручиваться в течение более длительного времени с более высокой эффективностью.
Подробные спецификации
- Среднее номинальное напряжение 3600 об / мин / кВ
- 14 граммов веса по отдельности
- Диаметр 14 мм при длине 7 мм и внешний вал диаметром 5 мм
- Архитектура 9N12P, используемая в сборке
- Поддерживает липо-аккумуляторы 3S и 4S
- CCW резьба
- Поддерживает 3-дюймовые стойки для посадки
Что нам понравилось в этом
- Низкий уровень шума при работе
- Увеличенная продолжительность полета
- Отличная схема дизайна
Что нам в нем не понравилось
Купить сейчас на Amazon
6.Бесколлекторный двигатель Tamiya с дистанционным управлениемНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет Tamiya 54611, качественный бесщеточный двигатель японского импортного уровня. TBLM-02S — это бесщеточный двигатель емкостью 10,5 т, совместимый с батареями 2S.
Двигатель не поставляется с сенсорным проводом, но имеет хорошо развитую сенсорную систему. Он поставляется с выводами 12 AWG, которые припаяны к концу корпуса двигателя. Это делает его идеальным для квадрокоптеров, таких как XV-01 TC Pro и аналогичных конструкций.
Подробные характеристики
- 12 AWG, припаянные к канистрам
- Имеет номинальное напряжение около 3700 об / мин / кВ
- Регулируемое время
- Стандартные разъемы Tamiya, доступные с дизайном
- 2S Lipo аккумулятор, совместимый с ними.
Что нам в нем нравится
- Отличная ценность бренда
- Модель «все в одном», готовая к подключению и игре
- Японское качество сборки
Что нам не понравилось в нем
- Меньшая батарея номинальная совместимость 2S
- Могло быть более высокое номинальное напряжение
- Не так много литературы по продукту, чтобы понять это дальше
Купить сейчас на Amazon
7. Бесщеточный двигатель Honorall
Бесщеточный двигатель Honorall НАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Следующим в нашем списке идет бесщеточный двигатель Honorall. Бесщеточный двигатель имеет конструкцию с высоким крутящим моментом, 12 пазами и 14 полюсами.
Этот бесщеточный двигатель идеально подходит для использования в радиоуправляемых автомобилях, самолетах, дронах и других небольших домашних проектах. Двигатель обеспечивает отсутствие нагрева с помощью алюминиевого радиатора.
Двигатель работает плавно и развивает максимальные обороты, поэтому дрон может мгновенно взлететь.Кроме того, двигатель был спроектирован с высокой точностью, чтобы обеспечить максимальное преобразование энергии.
Подробные спецификации
- Каждый двигатель весит 28,7 грамма
- Высота 28 мм и ширина 22 мм
- Номинальный ток 13 А
- Номинальное напряжение 1400 об / мин / КВ
- Подключается с использованием золотого бананового разъема 3,5 мм
- Обработка на станке с ЧПУ 60 Заготовка алюминиевого радиатора может.
- Подшипники ABEC5 увеличенного размера для высоких оборотов.

Что нам понравилось в этом
- Более продолжительное время работы радиоуправляемых машин и самолетов
- Создает высокий крутящий момент
- Плавная работа
- Максимальное преобразование энергии
- Предотвращает нагревание и повышает эффективность
Вещи, которые мы не понравилось
- Heavy, замедляющая радиоуправляемые машины и самолеты
Купить сейчас на Amazon
8.Бесщеточные двигатели ReadytoskyНАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Readytosky 2212 — бесщеточный двигатель низкого напряжения, разработанный для F330, X525, F450, S500, F500 и S550 DJI Phant квадрокоптеры.
Самое лучшее в двигателях — это то, что они в основном универсально совместимы по своей природе и имеют отверстие для установки нескольких групп, которое помогает поддерживать совместимость с несколькими дронами. Для частоты вращения он имеет скудное номинальное напряжение 920 кВ.
Для частоты вращения он имеет скудное номинальное напряжение 920 кВ.
Для компенсации низкого номинального напряжения двигатели имеют очень низкий уровень шума и высокую стабильность работы. Низкий уровень шума достигается благодаря строгим испытаниям динамического баланса, которые проводились во время испытаний. Стабильность достигается за счет новой конструкции седла рабочего колеса
Подробные характеристики
- Имеет приличный внешний диаметр 28 мм
- Высота 24 мм (без вала)
- 920 номинальное напряжение 920 об / мин / кВ.
- Направление вращения левой резьбы
Что нам понравилось в этом
- Стабильная производительность
- Низкий уровень шума
- Тщательно протестированный продукт
- Отличное качество сборки и
- Высокие отзывы и оценки
Вещи нам это не понравилось
- Низкие обороты на номинальное напряжение
Купить сейчас на Amazon
9. Бесщеточный двигатель Goolrc
Бесщеточный двигатель Goolrc НАЖМИТЕ ЗДЕСЬ, ЧТОБЫ УЗНАТЬ ЦЕНУ
Прочтите отзывы клиентов здесь
Следующим в списке идет GoolRC 2435, мощный бесщеточный двигатель со скоростью 4800 об / мин / кВ. Хотя большинство бесщеточных двигателей, упомянутых в списке, созданы для квадрокоптеров, этот также предназначен для радиоуправляемых машин и грузовиков. Двигатель рассчитан на ток 25 ампер.
Этот 4-полюсный двигатель имеет конструкцию с 12 шлицами для высокого крутящего момента. Двигатель также имеет алюминиевый радиатор из заготовок 6061 T6 CNC для уменьшения выделяемого тепла.Высокая мощность вращения также подходит для подшипников ABEC5 увеличенного размера.
Подробные спецификации
- 300 Вт максимальной мощности
- Электрический регулятор скорости в качестве дополнения к упаковке
- Диаметр банки 24 мм, длина 35 мм
- Диаметр вала 2 мм при длине 12 мм
- Пуля 3,5 мм разъем
- 58,3 грамма вес
Что нам понравилось в нем
- Максимальный ток.
- Рейтинг дроссельной заслонки с быстрым откликом
- Высокие обороты на КВ

Что нам не понравилось в нем
- Нет эстетичного дизайна
- Может улучшить качество сборки
Купить сейчас на Amazon27
902 10.Бесщеточный двигатель Hobbywing
НАЖМИТЕ ЗДЕСЬ, чтобы узнать цену
Прочтите отзывы клиентов здесь…
Наконец, в нашем списке находится мощный бесщеточный двигатель от Hobbywing. Hobbywing 38010201 Max10 SCT также оснащен вентилятором с электрической регулировкой скорости.
38010201 Max10 SCT, хотя и идет на высокой скорости, имеет значительный вес — около 105 граммов. Он поддерживает программный блок со светодиодной подсветкой, а также программный блок с ЖК-дисплеем. Но что касается веса, он также имеет большие размеры.
Подробные характеристики
- Пиковый ток при 120 или 830 А
- Поддержка никель-металлгидридных батарей 2S, 3S и 4S
- Выход BEC можно переключать между 6 В и 7,4 В
- Длина 49 мм, ширина 39,5 мм
- Диаметр 34,7 мм
- Диаметр вала 5 мм
- Номинальное напряжение 4000 об / мин / В
Что нам понравилось в нем
- Отлично подходит как для радиоуправляемых автомобилей, грузовиков и квадрокоптеров
- Функция для тяжелых условий эксплуатации
- Мультиустройство поддержка
Что нам в нем не понравилось
- Немного тяжелый для квадрокоптеров небольшого размера
Купить сейчас на Amazon
Основная информация о бесщеточных двигателях Это специализированный тип двигателя постоянного тока в основном без каких-либо изнашиваемых компонентов, поскольку у него не будет щеток. Он бывает двух типов — бегущие и опускающиеся. Их легко отличить по расположению помещенного в них магнита.
Он бывает двух типов — бегущие и опускающиеся. Их легко отличить по расположению помещенного в них магнита.
- Рабочие колеса: Магнит расположен внутри сердечника двигателя. Этот тип двигателя обычно используется в приложениях, где требуется высокая частота вращения, например, в высокоскоростных самолетах или модельных реактивных самолетах. При такой работе с высокими оборотами можно получить меньший крутящий момент на более низких скоростях. В двигателях Inrunners вал вращается внутри внешнего корпуса, и они используются в вертолетах RC.
- Out-runners: Магниты в этом outrunner расположены во внешнем корпусе. Его двигатель обычно вращается на более низких оборотах, так как он создает больший крутящий момент на низких скоростях. Он лучше всего подходит для самолетов с прямым приводом, таких как квадрокоптеры. В этих бегунах двигатель будет прикреплен к гребному винту, валу или обоим во всем внешнем корпусе и вращается вокруг центра.

Обмотки и постоянные магниты будут работать вместе в двигателе, создавая движущую силу с помощью магнитных полей.Это достигается простым переключением тока через провода статора, по которым протекает электрический ток, и, таким образом, создается ситуация, в которой магнитные поля внутри двигателей не выровнены.
Так же, как подковообразный магнит, магнитные поля будут оказывать большое давление, чтобы эффективно выровняться. Этот процесс создает крутящий момент и, таким образом, позволяет двигателю вращаться или вращаться. Электронный контроллер скорости (ESC) будет определять вращательное движение (RPM) и, таким образом, управлять потоком тока, позволяя ему генерировать необходимое магнитное поле.
Каковы основные компоненты этих бесщеточных двигателей постоянного тока? В общем, бесщеточные двигатели постоянного тока будут состоять из 4 основных компонентов. Это статоры, постоянные магниты, корпус двигателя и вал двигателя. Расскажите о них подробно, прежде чем покупать и использовать.
Расскажите о них подробно, прежде чем покупать и использовать.
Это три цепи с очень тонкими и длинными проводами, намотанными по кругу вокруг внутреннего сердечника двигателя. Для защиты этого провода от короткого замыкания он покрыт эмалью.Обычно, когда ток течет по проводу, он создает магнитное поле. Если провод обвести вокруг себя, то магнитное поле усиливается. Таким образом, чем больше ток, тем больше напряженность магнитного поля и, таким образом, от двигателя создается больший крутящий момент.
Чем больше ток, тем больше тепла будет выделяться и тем самым плавиться эмалевое покрытие, что приведет к короткому замыканию и возгоранию двигателя. Если вам нужна более высокая мощность, вам нужно искать двигатели с обмоткой из более толстых проводов, которые производят больше электрического тока за счет меньшего количества тепла.От того, как построен этот статор, зависит производительность двигателя.
2. Постоянные магниты Роторная часть этого двигателя сделана с постоянными магнитами для создания фиксированного магнитного поля, которое аналогично создается набором редкоземельных магнитов или подковообразных магнитов. Магниты приклеены к внешнему корпусу двигателя с помощью эпоксидной смолы в двигателях с внешними направляющими, тогда как магниты закреплены во внутреннем корпусе двигателя в двигателях с внутренними рабочими колесами.
Магниты приклеены к внешнему корпусу двигателя с помощью эпоксидной смолы в двигателях с внешними направляющими, тогда как магниты закреплены во внутреннем корпусе двигателя в двигателях с внутренними рабочими колесами.
Кожух двигателя сделан из легкого алюминиевого металла и используется для защиты обмоток и магнитов.В некоторых усовершенствованных моделях двигатель содержит специально разработанные корпуса, такие как миниатюрные вентиляторы, которые позволяют воздуху проходить через обмотки двигателя, пока двигатель вращается, охлаждая его и позволяя создавать больше мощности для эффективного функционирования.
4. Вал мотораВал мотора прикреплен к вращающейся части на внешнем кожухе внешнего бегунка. Он действует как рабочий компонент двигателя, передавая крутящий момент, создаваемый двигателем, на гребной винт.
Как выбрать лучший бесщеточный двигатель? Выбор бесщеточного двигателя для радиоуправляемого самолета, квадрокоптера или игрушек — довольно сложный процесс. Итак, чтобы получить четкое представление о том, как выбрать лучший, вы должны знать, какие факторы следует учитывать перед покупкой этих двигателей BLDC.
Вот некоторые ключевые факторы, которые следует проверить перед покупкой. Посмотри на это.
1. Размер двигателя:Необходимо определить размер двигателя, прежде чем они собираются покупать или использовать его. Чаще всего производители используют стандартную схему наименования двигателей из 4-значного числа. Например, двигатель с названием 2205, в котором первые 2 цифры представляют диаметр статора (в мм).Последние 2 цифры обозначают высоту (в мм).
Если одна из этих двух цифр больше, то двигатель будет обрабатывать большую мощность и, следовательно, генерировать больший крутящий момент. Если компромисс между большим числом, то это называется более тяжелый / больший двигатель.
Ознакомьтесь с некоторыми из наиболее часто используемых типоразмеров двигателей.
- 1806 — Довольно часто используется в мини-квадрокоптерах, которые вращаются с 3-дюймовыми или 4-дюймовыми пропеллерами.
- 2204 — Этот двигатель пользуется популярностью в течение длительного времени до 2015 года, но в наши дни встречается редко.Он использует 5-дюймовые пропеллеры.
- 2205 — Самый маленький и популярный в наши дни двигатель. Вы должны использовать его с 5-дюймовыми стойками с тройным лезвием.
- 2206 — Чтобы выиграть в войне за тягу, большинство производителей начали увеличивать размер своих двигателей, используя дуговые магниты N52. Таким образом, это приводит к увеличению тяги на 15% (примерно).
- 2207/2407 — Эти двигатели 2407 и 2207 встречаются редко, так как они производятся для создания тяги более чем на 50% выше по сравнению с двигателями типа 2206.

Скорость двигателя зависит от скорости, с которой вам нужен самолет или игрушка. Итак, чтобы сравнить скорость двигателя, вам нужно найти номер KV. Этот киловольт равен оборотам на вольт. Он объясняет, сколько раз двигатель повернется на каждый вольт. Если напряжение увеличивается, двигатель будет быстро вращаться.
Он объясняет, сколько раз двигатель повернется на каждый вольт. Если напряжение увеличивается, двигатель будет быстро вращаться.
Все двигатели будут иметь номинальное значение KV, и этот рейтинг будет определять скорость вращения двигателя гребным винтом.Максимальная частота вращения двигателя определяется простым умножением значения KV на напряжение аккумулятора. Например, у вашего двигателя 2300 кВ, и устройство будет летать с батареей 4S LiPo, тогда двигатель вращается со скоростью 14,8 X2300 = 34040 об / мин.
Здесь мы приводим некоторые рекомендации / справочные сведения о том, насколько эффективно ваш двигатель будет работать с выбранным гребным винтом.
- Двигатель будет работать на 2600 кВ и более с винтами диаметром 4 дюйма.
- Для 5-дюймовых гребных винтов двигатель работает от 2300 — 2600 кВ.
- Пропеллеры с 6-дюймовым диаметром заставят устройство работать на двигателе с мощностью 2300 кВ или меньше
В общем, тяга пропорциональна мощности. Итак, чтобы увеличить мощность, которую принимает двигатель, вы должны следовать несколькими способами.
Итак, чтобы увеличить мощность, которую принимает двигатель, вы должны следовать несколькими способами.
Выберите двигатель с высокой постоянной частотой вращения, равной укорочению всех обмоток. Это снижает электрическое сопротивление и увеличивает количество тока, протекающего через них, и тем самым обеспечивает уменьшающуюся отдачу.Когда обмотки становятся короче, создается меньшая магнитная сила с большим нагревом. Таким образом, он влияет на способность двигателя преобразовывать электрическую мощность в КПД или крутящий момент.
Чтобы повысить эффективность двигателя при передаче большего количества энергии, просто увеличьте количество меди в обмотках или просто добавив больше обмоток. Снова уменьшите электрическое сопротивление обмоток, чтобы пропустить больше мощности / тока. Большее количество меди в обмотке приводит к большему весу, и двигатели, которые набиты обмотками, должны либо увеличивать размер двигателя, либо ухудшать структуру статора.В большинстве случаев размер двигателя будет увеличиваться, и поэтому большие двигатели могут легко создавать большую тягу.
Тип постоянного магнита, используемого в двигателе BLDC, создает сильное магнитное поле для работы обмоток и тем самым увеличивает мощность. Эта концепция использовалась до тех пор, пока производители не начали использовать магниты N52 в своих двигателях, и это изменение привело к мгновенному увеличению мощности примерно на 25% при сравнении двигателей с другими магнитами.
4. Дуговые магниты:Зазор между постоянными магнитами, приклеенными к статору и колоколу, также влияет на мощность.Небольшие сокращения пространства между источниками двух магнитных полей повлияют на то, сколько силы магниты могут оказывать друг на друга. Это называется воздушным зазором двигателя.
Итак, чтобы решить эту проблему, большинство производителей улучшают ее, просто превращая постоянные магниты в дугообразные. Эти дуговые магниты уменьшают воздушный зазор между магнитом и статором (менее 1 мм) и тем самым улучшают характеристики.
5. Вал двигателя:
Вал двигателя: Нельзя игнорировать длину и размер вала двигателя.В основном люди выбирают двигатель с валом 5 мм, потому что это идеальный диаметр отверстия. В случае, если вы хотите получить двигатель с маленьким валом, просто установите на стойки переходник размера вала. Для вала большего размера необходимо просверлить отверстие большего размера на гребном винте.
Также убедитесь, что размер вала соответствует стойке и контргайке. Итак, двигатель должен иметь вал необходимой длины. Например, вал длиной не менее 13 мм, а затем короче, будет работать, чтобы действительно затянуть гайки, чтобы они были плотно затянуты во время полета, и тем самым приведет к обрыву резьбы.
6. Мощность: Мощность двигателя указывается в ваттах (Вт), которые измеряются как напряжение x ампер. Чем выше мощность, тем мощнее двигатель. Обязательно проверьте, сколько ампер может потреблять двигатель, чтобы найти правильный электронный регулятор скорости (ESC). Использование ESC, который как минимум на 20% больше, заставит двигатель работать эффективно. В случае, если двигатель тянет 20А, а затем использовать регулятор скорости 30А, все будет нормально.
Использование ESC, который как минимум на 20% больше, заставит двигатель работать эффективно. В случае, если двигатель тянет 20А, а затем использовать регулятор скорости 30А, все будет нормально.
Необходимо знать, какую тягу будет производить их двигатель с различными комбинациями гребного винта и аккумулятора. Это поможет подобрать двигатель идеального размера для вашего проекта. Например, если вы ищете модель с весом 2 фунта, выберите двигатель, обеспечивающий тягу более 2 фунтов.
8. Электронный контроллер скорости (ESC):ESC используется для управления движением или скоростью бесщеточного двигателя путем простого включения полевых МОП-транзисторов, чтобы создать вращающееся магнитное поле и тем самым позволить двигателю вращаться.Чем выше частота или быстрее ESC, который выполняется через 6 интервалов, тем выше будет скорость двигателя.
Вы должны знать, когда активировать правильную фазу, и для этого вам необходимо знать положение ротора, при котором его положение будет определяться двумя общими методами.
- Первый метод — В роторе используются датчики на эффекте Холла, которые определяют магнитное поле, встроенное в статор (расположенное под углом 120–160 градусов друг к другу), и генерируют высокий уровень для одного магнитного полюса и низкий для другого, противоположного полюса.Обладая этой информацией, ESC будет знать, когда активировать последовательность коммутации.
- Второй метод — Здесь значение обратной электродвижущей силы или обратной ЭДС используется для определения положения ротора. Эта ЭДС является результатом генерации магнитного поля прямо противоположного процесса. Или просто изменение магнитного поля, которое проходит через катушку, вызовет в катушке ток. Таким образом, это вызовет ток в катушке и тем самым приведет к падению напряжения в катушке.ESC фиксирует падения напряжения и, таким образом, предсказывает, когда должен активироваться следующий интервал.
Наконец, это основной принцип работы этих двигателей BLDC и ESC, и он остается неизменным даже при увеличении числа полюсов как статора, так и ротора.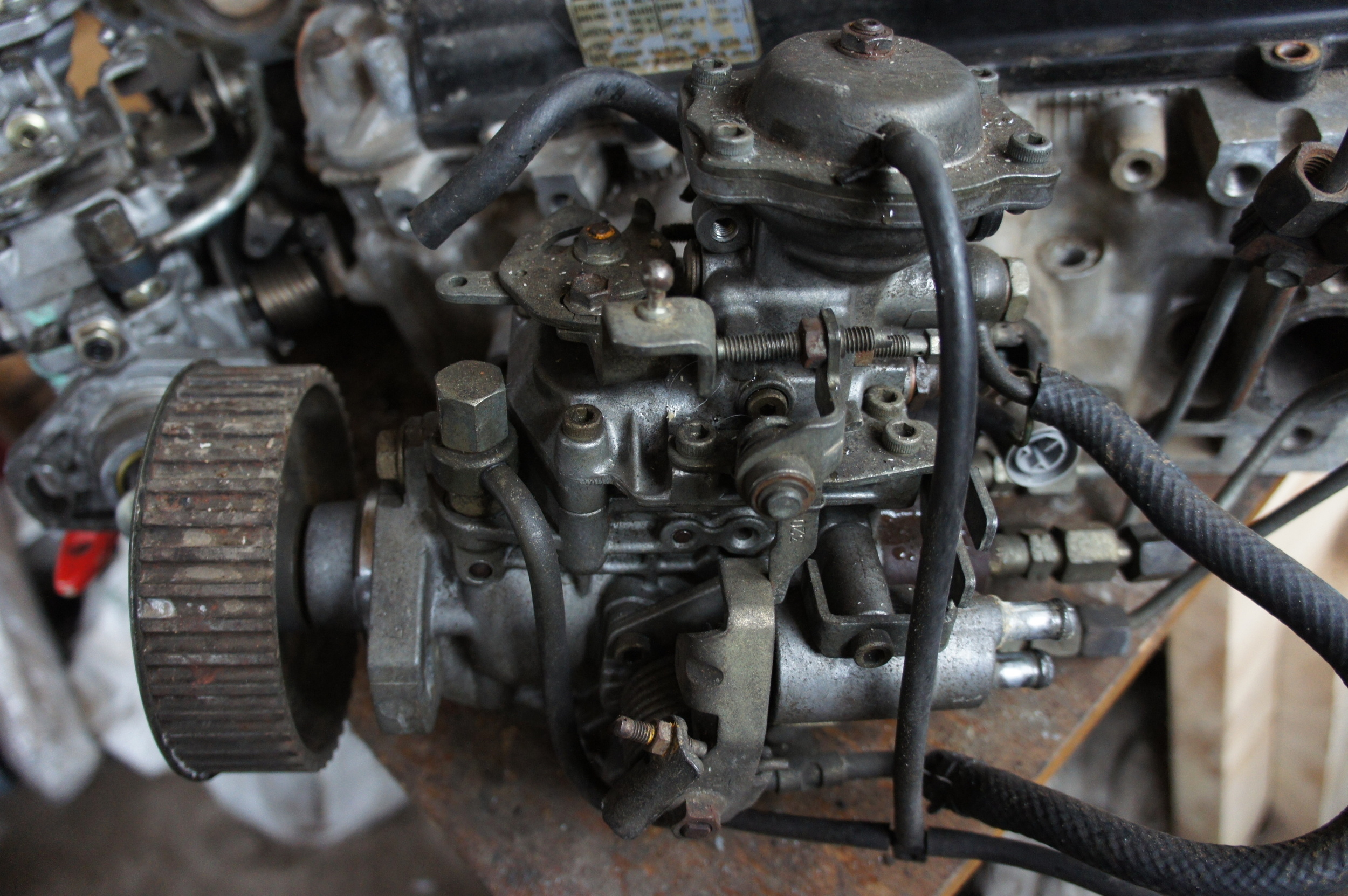 Для трехфазного двигателя количество интервалов увеличивается для завершения цикла.
Для трехфазного двигателя количество интервалов увеличивается для завершения цикла.
Бесщеточные двигатели для мини-квадроциклов должны иметь по крайней мере четыре, и каждый грамм должен экономить на двигателе и умножается на четыре.Таким образом, более тяжелый двигатель будет производить больше мощности и тем самым легко компенсировать их вес.
10. Цена:Цена продукта будет определять его качество и эффективность двигателя. Чтобы купить бесщеточный двигатель лучшего качества, нужно потратить не менее 10-25 долларов на их моторы. Также нужно искать гарантию производителя на этот продукт.
Преимущества бесщеточных двигателей:Бесщеточные двигатели постоянного тока коммутируются электронно и не используют щетки для коммутации.Он обладает рядом преимуществ по сравнению с традиционными щеточными двигателями постоянного тока. Некоторые из них упомянуты ниже.
- Он может работать на высоких скоростях до 100 000 об / мин, а не на щеточных двигателях с высокими оборотами до 20 000 об / мин.
- Он имеет более длительный срок службы — около 10 000 часов работы.
- Однако в этом двигателе нет изнашиваемых деталей, за исключением подшипников, и поэтому этот двигатель BLDC требует меньше обслуживания.
- Они эффективны, надежны и долговечны.
- Его двигатель будет работать на высоких скоростях, поэтому он лучше всего подходит для вентиляторов, шлифовальных машин, удаленных автомобилей, квадрокоптеров и пил.
- Эти двигатели BLDC систематически оснащены энкодером, который позволяет определять положение ротора и электронное переключение. Таким образом, он идеально подходит для приложений с высокой точностью серводвигателя.
Этот двигатель с BLDC имеет некоторые недостатки, о которых говорится ниже.
- Управлять двигателем без регулятора будет сложно.
- Для приводов требуются специализированные редукторы и низкие пусковые нагрузки, что усложняет задачу.
- Он стоит дороже, чем щеточные или другие типы двигателей постоянного тока, почему, потому что важно интегрировать контроллер, контроллер переключения.

Эту разницу между щеточными и бесщеточными двигателями легко найти.Щеточные двигатели используют щеточные варианты, которые сделаны из углерода, тогда как бесщеточный двигатель генерирует мощность с помощью магнитов. По этой причине бесщеточные двигатели адаптированы должным образом, вырабатывают меньше тепла, создают меньшее трение или отсутствие трения и, таким образом, обеспечивают наилучшую производительность.
2. Как определить, щеточный или бесщеточный двигатель? Все, что вам нужно, это измерить сопротивление вашего двигателя при низком напряжении около 100 мВ. Хотя большинство цифровых мультиметров работают, но если сопротивление превышает несколько килоом, то это, вероятно, бесщеточный двигатель. В случае, если сопротивление ниже 100 Ом, то щеткой.
В случае, если сопротивление ниже 100 Ом, то щеткой.
Бесщеточные двигатели могут использоваться в различных приложениях, таких как дроны, дистанционные автомобили с дистанционным управлением, вентиляторы, станки с ЧПУ, мини-квадрокоптеры и промышленные роботы. Наряду с этим, их можно использовать в различных приложениях, таких как приложения с регулируемой скоростью, управление положением, приложения с высокой скоростью и приложения с низким уровнем шума в областях автомобильной промышленности, потребительских приложений, промышленной автоматизации, медицины и химии, а также аэрокосмической промышленности и приборостроения Заключение
Бесщеточный двигатель имеет значительно более высокий КПД, чем щеточный двигатель, поэтому большинство воинов дронов предпочитают строить свои квадрокоптеры с использованием бесщеточного двигателя.
Из всех перечисленных бесщеточных двигателей выделяется бесщеточная силовая установка Traxxas . Благодаря большой выходной мощности, номинальному напряжению 3500 об / мин / В, монтажной пластине для регулировки скорости, 3-х приводному электрическому регулированию скорости и ограниченным возможностям дроссельной заслонки, это лучший бесщеточный двигатель для обоих; начинающие и опытные любители дронов. Кроме того, конструкция двигателя является водонепроницаемой, а также имеет впечатляющий обзор и оценку.
Благодаря большой выходной мощности, номинальному напряжению 3500 об / мин / В, монтажной пластине для регулировки скорости, 3-х приводному электрическому регулированию скорости и ограниченным возможностям дроссельной заслонки, это лучший бесщеточный двигатель для обоих; начинающие и опытные любители дронов. Кроме того, конструкция двигателя является водонепроницаемой, а также имеет впечатляющий обзор и оценку.
Хотя это были наши выборы, мы заинтригованы вашими мыслями и мнениями.Что вы думаете о нашем списке? Вы имели в виду какой-нибудь бесщеточный двигатель, который мы упустили? Или у вас есть вопросы по дронам и квадрокоптерам? Если это так, не стесняйтесь писать нам в разделе комментариев ниже, и наша команда ответит вам как можно скорее.
Бесщеточный двигатель HOBBYWING — Легковые и грузовые автомобили — HOBBYWING Северная Америка
HOBBYWING ПОСТРОЕН И ПОДДЕРЖИВАЕТ
HOBBYWING гордится своим производственным оборудованием, а также использованием высококачественных компонентов, а также процессами сборки и тестирования. Каждый бесщеточный двигатель HOBBYWING построен и протестирован в соответствии со строгими стандартами HOBBYWING. Статор каждого двигателя наматывается вручную для максимального заполнения медью, и каждый двигатель индивидуально тестируется на предмет соответствия. Двигатели также настроены на то же заводское время, работают под моделируемой нагрузкой и визуально проверяются, упаковываются и взвешиваются, чтобы гарантировать отправку наилучшего продукта клиентам. Все продукты HOBBYWING поддерживаются опытным персоналом службы поддержки HOBBYWING и гоночной командой.
Каждый бесщеточный двигатель HOBBYWING построен и протестирован в соответствии со строгими стандартами HOBBYWING. Статор каждого двигателя наматывается вручную для максимального заполнения медью, и каждый двигатель индивидуально тестируется на предмет соответствия. Двигатели также настроены на то же заводское время, работают под моделируемой нагрузкой и визуально проверяются, упаковываются и взвешиваются, чтобы гарантировать отправку наилучшего продукта клиентам. Все продукты HOBBYWING поддерживаются опытным персоналом службы поддержки HOBBYWING и гоночной командой.
Бесщеточный мотор XeRun Sensored для PRO
Двигатели XeRun AX 540/550 FOC для Crawlin
| 1/10 | 1/10 | 1/10 | |
| Размер мотора | 540 | 540L R2 | 550 R2 |
| 1200кв | 1400 кв 2100 кв 2800 кв | 3300кв | |
Отрегулируйте. время время | ДА | ДА | ДА |
| СТОЛБ | 4 | 4 | 4 |
| Сенсорный режим | ДА | ДА | ДА |
| Водонепроницаемость | ДА | ДА | ДА |
Бесщеточный двигатель EZRUN для модернизации RTR, MAX SPEED & POWER
| СТАНДАРТНОЕ ОБНОВЛЕНИЕ — Серия бесщеточных двигателей EZRUN | ||||||||
| 1/5 | 1 / 5–1 / 6 | 1 / 6–1 / 7 | 1/8 | 1 / 8–1 / 10 | 1/10 SCT | 1/10 | 1/18 — 1/24 | |
РАЗМЕР | 56113 | 5687 | 4985 | 4274 | 4268 | 3660 | 3652 | 2030 |
КВ / Т | 800кв | 1100кв | 1650 | 2200кв | 2600кв | 4600кв | 5400кв | 18 зуб. |
Режим датчика | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ | НЕТ |
| | | | | | ||||

Роль проприоцепции в управлении моторикой и функциональной стабильности суставов
Это часть II серии из 2 частей, в которой обсуждаются текущие представления о сборе периферической афферентной информации, ее обработке и уровнях моторного контроля, поскольку они связаны с функциональной стабильностью суставов. В части I были рассмотрены сенсомоторная система и механизмы, ответственные за проприоцепцию и нервно-мышечный контроль, поскольку они связаны с функциональной стабильностью суставов. Цель Части II — развить и применить концепции, разработанные в Части I. В частности, мы рассмотрим вклад проприоцепции в управление активацией динамических ограничений и двигательный контроль.
В части I были рассмотрены сенсомоторная система и механизмы, ответственные за проприоцепцию и нервно-мышечный контроль, поскольку они связаны с функциональной стабильностью суставов. Цель Части II — развить и применить концепции, разработанные в Части I. В частности, мы рассмотрим вклад проприоцепции в управление активацией динамических ограничений и двигательный контроль.
Критически важным для эффективного управления моторикой является точная сенсорная информация, касающаяся как внешних, так и внутренних условий окружающей среды тела. 1 — 4 Во время целенаправленного поведения, такого как поднятие коробки во время ходьбы, должны быть приняты меры для адаптации двигательной программы ходьбы к изменениям, происходящим во внешней среде (неровная поверхность) и внутренней среде ( изменение центра масс из-за дополнительной нагрузки). Эти положения стимулируются сенсорными триггерами, возникающими как в режиме обратной связи (обнаружение механорецептором измененной опорной поверхности), так и в режиме прямой связи (ожидание изменения центра масс по сравнению с предыдущим опытом). Хотя некоторая афферентная информация может быть избыточной в трех сенсорных источниках (соматосенсорном, визуальном, вестибулярном), с каждым источником связаны определенные уникальные роли, которые не могут полностью компенсироваться другими сенсорными источниками. Например, проприоцептивная информация играет важную роль в способности изменять внутренние модели, используемые с упреждающим управлением 5 , 6 , которое, как было продемонстрировано, лишь частично компенсируется визуальной информацией. 7
Хотя некоторая афферентная информация может быть избыточной в трех сенсорных источниках (соматосенсорном, визуальном, вестибулярном), с каждым источником связаны определенные уникальные роли, которые не могут полностью компенсироваться другими сенсорными источниками. Например, проприоцептивная информация играет важную роль в способности изменять внутренние модели, используемые с упреждающим управлением 5 , 6 , которое, как было продемонстрировано, лишь частично компенсируется визуальной информацией. 7
Роль проприоцептивной информации в моторном управлении можно разделить на 2 категории. 2 Первая категория включает роль проприоцепции по отношению к внешней среде. Моторные программы часто приходится корректировать с учетом неожиданных возмущений или изменений внешней среды. Хотя источник этой информации часто в значительной степени связан с визуальным вводом, существует множество обстоятельств, при которых проприоцептивный ввод является самым быстрым или наиболее точным, или и тем, и другим. 1 В приведенном выше примере потребовалась модификация моторной программы для ходьбы в ответ на неровную опорную поверхность. Если зрение человека было зафиксировано на коробке, которую нужно взять, он или она, возможно, не заметили визуально неровную опорную поверхность. В дополнение к изменениям в подошвенных кожных рецепторах, механорецепторы мышц и суставов сообщали бы о степени изменения положения голеностопного сустава и стимулировали необходимую модификацию моторной программы. Планирование перемещений также требует внимания к ограничениям окружающей среды. 8 Это особенно верно в отношении выбора стратегии поддержания контроля позы. 9 — 11 Например, сенсорное обнаружение неустойчивого поручня по периферийным сигналам (кинестезия, изменение положения суставов) изменит двигательную программу, используемую для предотвращения падения на скользкой лестнице. На этапах планирования движения визуальные образы используются для создания модели среды, в которой будет происходить движение.Проприоцепция была описана как важная во время выполнения движения для обновления команд прямой связи, полученных из визуального образа. 5 , 6
1 В приведенном выше примере потребовалась модификация моторной программы для ходьбы в ответ на неровную опорную поверхность. Если зрение человека было зафиксировано на коробке, которую нужно взять, он или она, возможно, не заметили визуально неровную опорную поверхность. В дополнение к изменениям в подошвенных кожных рецепторах, механорецепторы мышц и суставов сообщали бы о степени изменения положения голеностопного сустава и стимулировали необходимую модификацию моторной программы. Планирование перемещений также требует внимания к ограничениям окружающей среды. 8 Это особенно верно в отношении выбора стратегии поддержания контроля позы. 9 — 11 Например, сенсорное обнаружение неустойчивого поручня по периферийным сигналам (кинестезия, изменение положения суставов) изменит двигательную программу, используемую для предотвращения падения на скользкой лестнице. На этапах планирования движения визуальные образы используются для создания модели среды, в которой будет происходить движение.Проприоцепция была описана как важная во время выполнения движения для обновления команд прямой связи, полученных из визуального образа. 5 , 6
Вторая категория ролей, которые проприоцептивная информация играет в управлении двигателем, заключается в планировании и модификации внутренне генерируемых команд двигателя. 2 До и во время команды двигателя система управления двигателем должна учитывать текущее и изменяющееся положение задействованных суставов, чтобы учесть сложные механические взаимодействия внутри компонентов опорно-двигательного аппарата. 2 Proprioception лучше всего передает необходимую информацию о перемещении и положении сегментов в систему управления двигателем. 1 , 2 В ситуации, когда одиночный сустав движется по дуге движения 10 °, точная мышечная сила, необходимая для выполнения задачи, зависит от угла сустава. Как можно догадаться, задача определения того, какое напряжение мышцы требуется для движения, становится чрезвычайно сложной и важной для движений с участием нескольких суставов. 2 , 4 , 12 Каждое угловое изменение положения сустава сопровождается изменениями механических преимуществ, связанных со всеми мышцами, которые проходят через сустав. Многие задачи включают в себя последовательность совмещенных движений внахлест. Система управления моторикой должна рассматривать множественные движения, возникающие как прямую функцию активации мышц, так и косвенно от межсегментарной динамики (движение одного сустава вызывает движение другого).Проприоцепция предоставляет большую часть информации, необходимой для решения всех этих проблем с движением. 2 , 4 , 7 , 12 , 13
Роль проприоцепции в сенсомоторном управлении простыми задачами функциональной устойчивости суставов33 для ровного управления двигателем пластический процесс 3 , который подвергается постоянному пересмотру и модификации на основе интеграции и анализа сенсорного ввода, эфферентных моторных команд и результирующих движений.Проприоцептивная информация, исходящая от суставных и мышечных рецепторов, как было показано ранее, играет важную роль в этом процессе. В основе выполнения всех двигательных задач лежат определенные события, часто очень тонкие, которые направлены на подготовку, поддержание и восстановление устойчивости как всего тела (устойчивость позы), так и сегментов (устойчивость суставов). Что касается стабильности суставов, эти действия представляют собой нервно-мышечный контроль. Проприоцептивная информация, впервые обнаруженная и описанная Шеррингтоном 14 почти 100 лет назад, важна для поддержания обоих типов стабильности.Поскольку считается, что суставные механорецепторы разрушаются в связи с травмой сустава, в этом разделе мы сосредоточим внимание на роли суставных механорецепторов в сенсомоторном контроле над функциональной стабильностью суставов. Недавно было опубликовано обсуждение вклада суставных рецепторов в контроль позы. 15
Со времени работы Палмера, 16 одним из основных принципов, касающихся роли суставных афферентов в функциональной стабильности суставов, была прямая рефлексивная активация альфа-мотонейронов (α МН). 17 — 19 Это убеждение, однако, не является бесспорным 20 — 22 и представляет собой одну из самых больших текущих дискуссий в сенсомоторной системе. Прямые доказательства, подтверждающие существование связочно-мышечных рефлексов, в основном возникли благодаря прямой электрической и механической стимуляции коленных, голеностопных и плечевых связок или капсулы (или обеих). 19 , 23 — 26 Подобно использованию электрической стимуляции афферентных нервных волокон для документирования кортикальных проекций, применимость этих результатов к нормальной физиологической функции остается спекулятивной и неопределенной. 27 Специфическая для механических стимулов нагрузка, необходимая для вызова α-МН ответов, подвергалась критике как превышающая нормальные физиологические нагрузки. 22 , 28 , 29 Даже если предположить, что связочно-мышечный рефлекс существует, следует усомниться в его эффективности в обеспечении защиты суставов из-за времени задержки 22 , 29 , 30 и слабые величины ответа, 31 , особенно по сравнению с рефлексами, стимулируемыми мышечными веретенами. 28 Несмотря на противоречивую фундаментальную науку и эмпирическую поддержку, исследования in vivo на людях с участием нарушений голеностопного и коленного суставов в сочетании с электромиографией были проведены и дали разные результаты. 17 , 18 , 32 — 40 Например, на голеностопном суставе количество исследований, демонстрирующих повышенную латентность с механически или функционально нестабильными суставами (или обоими) 32 — 35 соответствует такому же количеству исследований, не выявивших различий. 36 — 40 Необходимо учитывать несколько факторов, чтобы сделать выводы, которые можно сделать на основе этой экспериментальной модели. Они рассмотрены в следующей статье, в которой описаны методы сенсомоторных измерений. 41
В отличие от кажущейся спорной активации альфа-МН, суставные афференты более единодушно приписывают аналогичные эффекты на гамма-мотонейроны (гамма-МН). 21 , 22 , 29 , 42 , 43 Интересно, что вопреки тому, что многие утверждали, Фримен и Вайк 43 приписали увеличение мышечной активности ответ на стимуляцию совместных механорецепторов на активацию γ-МН, а не α-МН.С момента их исследования многие исследования продемонстрировали рефлексивное действие суставных афферентов на γ-МН посредством электрической стимуляции 44 и тракции ткани с использованием уровней силы ниже тех, которые связаны с повреждением ткани и ноцицепцией. 21 , 22 , 42 , 45 , 46 Повышенная активация γ-MN, которая может происходить из-за входных данных, исходящих от кожных или мышечных источников, а также нисходящих надспинальных команд , служит для повышения чувствительности мышечного веретена.Как повышенная чувствительность мышечного веретена связана с сенсомоторным контролем функциональной стабильности суставов? Ответ на этот вопрос станет очевидным при следующем обсуждении жесткости.
Жесткость мышц определяется как отношение изменения силы к изменению длины. 29 , 47 , 48 В отличие от жесткости мышц, которая относится конкретно к свойствам жесткости, проявляемым теномышечными тканями, жесткость сустава включает вклад всех структур, расположенных внутри и над суставом ( мышцы, сухожилия, кожа, подкожная клетчатка, фасция, связки, суставная капсула и хрящ). 49 — 51 Было проведено несколько исследований в попытках количественно оценить вклад каждой конструкции в жесткость соединения. Эти исследования обычно показывают, что мышечные и суставные связочные и капсульные структуры, пересекающие сустав, вносят равный вклад в пассивных режимах. 50 , 51
Составляющие мышечной жесткости можно разделить на внутренние и внешние (рефлекторные) компоненты. 52 Многие элементы, составляющие мышечную ткань и соединительные несокращающиеся ткани (сухожилие, фасция), содержат большое количество коллагена и, следовательно, проявляют свойства эластичности и вязкости при растяжении.Кроме того, внутренний компонент включает количество актин-миозиновых перекрестных мостиков (уровень мышечной активации), существующих в данный момент, 29 , 53 , а также факторы обоих отдельных мышечных волокон (т. Е. Саркомера). отношения длины-напряжения и силы-скорости) и целых мышц (т. е. расположение мышечных волокон внутри мышцы). 54 Уровни активации, существующие в мышце в данный момент, являются функцией как предшествующих рефлексов, так и нисходящих влияний на пул α-MN. 29
Внешний вклад жесткости мышц возникает из-за повышенной рефлекторной нейронной активации мышцы. Это в значительной степени определяется возбудимостью пула мотонейронов, 29 , которая сама по себе в значительной степени зависит от чувствительности первичных афферентов мышечного веретена, вызывающих аутогенетические и гетерогенные рефлексы, а также нисходящих нейронных команд. На эти составляющие накладывается ряд взаимодействующих факторов, включающих весь комплекс мышечного сустава, таких как кинематика сустава (то есть угол, скорость), места прикрепления (то есть точное место прикрепления мышц) и переходы тканей (то есть мышцы, сухожилие, кость). 54
С теоретической точки зрения повышенная жесткость мышц и, следовательно, повышенная жесткость суставов, по-видимому, является полезной характеристикой для повышения функциональной стабильности суставов. Во-первых, более жесткие мышцы потенциально должны более эффективно сопротивляться внезапным смещениям суставов. 29 , 47 , 55 , 56 Хотя не всем дестабилизирующим силам можно полностью противодействовать, многие потенциально могут быть уменьшены по величине, тем самым уменьшая частоту возникновения подвывиха и травм суставов.Это может иметь важное значение для поддержания функциональной стабильности, когда механическая стабильность недостаточна, и может помочь в объяснении умеренной корреляции между жесткостью мышц подколенного сухожилия и функциональной способностью у лиц с недостаточностью передней крестообразной связки (ACL), обнаруженной McNair et al. 47 Было продемонстрировано, что произвольное сокращение группы мышц непосредственно увеличивает жесткость суставов. 56 , 57 Сокращение мышц-антагонистов, как полагают, дополнительно увеличивает жесткость сустава за счет увеличения сжатия между суставными поверхностями. 29 , 56 , 57
Во-вторых, более жесткие мышцы увеличивают потенциальные возможности внешнего компонента. Считается, что более жесткие мышцы в результате повышенной активации легче передают нагрузку на мышечные веретена, тем самым сокращая некоторое время задержки, связанное с началом рефлексивной активности. 58 , 59 Некоторые физические события, способствующие электромеханической задержке, такие как временной интервал между активацией мышц и началом сегментарного ускорения, 60 уменьшаются в мышцах с более высокими уровнями активации.Таким образом, не только повышается начальное сопротивление смещению сустава за счет повышенной внутренней жесткости, но также повышается способность задействовать улучшенный рефлексивный ответ.
Высшим центрам управления моторикой приписывают компенсацию дефицита статического стабилизатора за счет изменения движений и паттернов активации мышц. 61 — 63 Подобно обсуждаемым спинальным рефлексам, прямые и косвенные данные свидетельствуют о том, что суставные и связочные механорецепторы важны для надспинального сенсомоторного контроля над динамической стабильностью суставов.У людей сложность, связанная с этим аспектом сенсомоторной системы, возникает из-за неспособности легко вызвать изолированные экспериментальные манипуляции с одной или несколькими целевыми структурами, не вызывая многочисленных вмешивающихся факторов. Таким образом, исследователи чаще всего пытаются ретроспективно измерить пациентов с различными состояниями и размышлять о том, являются ли вызванные изменения или адаптации результатом повреждения статических стабилизаторов, нервных элементов или того и другого. Прямые доказательства, подтверждающие роль суставных рецепторов в сенсомоторном контроле динамической стабильности суставов, могут быть получены только в исследованиях на животных после экспериментально индуцированной деафферентации.Непомерно большое количество ретроспективных исследований на людях документально подтвердило изменения в движениях и паттернах мышечной активации в механически и функционально нестабильных суставах, поэтому мы рассмотрим только несколько общих тем, подтверждающих роль суставных рецепторов в высших центрах управления моторикой.
При травмах колена, например, у людей с разрывом ПКС развивается адаптивный двигательный паттерн, который включает усиленную активацию подколенных сухожилий перед нагрузкой на сустав 64 — 67 и поддержание колена в более согнутом положении во время принятия нагрузка. 61 , 68 , 69 Считается, что оба эти изменения предотвращают трансляцию передней большеберцовой кости в отсутствие ACL. Повышение активности подколенных сухожилий происходит перед нагрузкой на сустав с упреждающим контролем. Это говорит о том, что моторная программа деятельности была изменена, и косвенно поддерживает идею изменения моторного контроля выше рефлексивного уровня.
Изменения в последовательности активации мышц, по-видимому, происходят не только в пораженном суставе, но также в дистальных и проксимальных суставах, что дополнительно подтверждает идею более высоких двигательных изменений.Что касается изменений положения и активации проксимального сустава, доказательства были обнаружены у субъектов, перенесших разрыв ПКС 61 и травму голеностопного сустава. 38 , 70 Повышенная активация мускулатуры, действующей на голеностопный сустав и голень (передняя большеберцовая и камбаловидная мышцы), была продемонстрирована у субъектов с дефицитом ACL. 65 После травмы голеностопного сустава несколько исследователей 71 — 73 сообщили об использовании стратегий постурального контроля, которые в большей степени зависят от активации мышц проксимального сустава (тазобедренного сустава).В совокупности все эти исследования подтверждают предположение об изменении моторного контроля более высокого центра после ортопедической травмы. Опять же, стимул для этих изменений остается спорным: афферентные изменения со стороны суставных рецепторов, потеря механической устойчивости или и то, и другое.
Freeman and Wyke 74 впервые предоставил прямые доказательства, подтверждающие важность суставных рецепторов в сенсомоторном контроле над стабильностью суставов, путем хирургической резекции задних или медиальных суставных нервов кошек.Поскольку оба этих нерва передают афферентную информацию преимущественно от коленного сустава, хирургическая процедура вызвала деафферентацию сустава без нарушения механической стабильности. После операции, помимо моторных изменений на уровне позвоночника, у животных наблюдались изменения в надспинальных моторных программах, контролирующих произвольные движения. Кроме того, также были изменены регулировки постурального контроля, инициированные визуальными и вестибулярными источниками. Авторы предположили, что изменения возникли вторично по отношению к потере локального воздействия на суставную капсулу коленного сустава.Когда это сопровождается нарушениями механической устойчивости, адаптация программ движений, разработанная после травмы, может помочь предотвратить повреждение вторичных фиксаторов и артропатию. 28 O’Connor et al., 75 , используя собак, сообщили, что, хотя деафферентации сустава было недостаточно, чтобы вызвать дегенерацию сустава, в сочетании с перерезкой ПКС тяжелые дегенеративные изменения стали более очевидными, чем после одной только перерезки связки.
Таким образом, оказывается, что проприоцепция является фундаментальной для сенсомоторного контроля над стабильностью суставов, при этом суставные рецепторы выполняют уникальные тонкие роли.Что касается жесткости, то мышечные веретена с более высоким возбуждением γ-MN усиливают как прямое, так и обратное управление механизмом динамического ограничения посредством прямого регулирования уровней активации мышц. Поскольку активация γ-MN в значительной степени зависит от периферических афферентных входов, адекватность и точность входных данных становятся важными факторами. Учитывая чувствительность рецепторов суставов и связок через диапазон движений суставов и их сильное влияние на активность γ-MN, становится весьма вероятным, что этот косвенный механизм может перевесить важность спорных прямых рефлексов α-MN.На более высоких моторных уровнях рецепторы суставов могут играть важную роль в развитии адаптаций моторной программы, чтобы компенсировать потерю механической стабильности. Рисунок 4 в части I суммирует роль суставных рецепторов в сенсомоторном контроле функциональной стабильности. Во всех этих областях необходимы дальнейшие исследования, чтобы полностью выяснить точные механизмы, с помощью которых рецепторы суставов вносят свой вклад.
Электрические машины — Кривая скорости крутящего момента асинхронного двигателя
Уравнение крутящего момента Тевенина было использовано выше для построения кривой крутящего момента асинхронной машины.Поскольку крутящий момент задается только как функция скольжения, можно использовать это уравнение, чтобы найти скольжение, при котором крутящий момент является максимальным. Однако математически более простой и интуитивно понятный Ответ можно найти, рассматривая поток мощности в эквиваленте Тевенина на рис. 2. Анализируя полную эквивалентную схему, было замечено, что
\ [ \ tau = \ frac {P_ {gap}} {\ omega_s} \]
Следовательно, поскольку синхронная скорость постоянна, максимальный крутящий момент возникает на такое же скольжение, как и максимальная мощность воздушного зазора.{0.5} \ right)} \]
Обсуждение
Из уравнений для крутящего момента и проскальзывания видно, что
- Скольжение, при котором возникает максимальный крутящий момент, пропорционально сопротивлению ротора
- Величина максимального крутящего момента не зависит от сопротивления ротора
Если все остальные параметры остаются постоянными, увеличение сопротивления ротора будет:
- Уменьшите скорость, при которой достигается максимальный крутящий момент
- Увеличьте пусковой крутящий момент (до \ (s_ {po} = 1 \))
- Увеличить скольжение для заданного крутящего момента
- Уменьшить скорость для заданного крутящего момента
- Увеличить потери ротора при заданном крутящем моменте
Последний пункт выше можно показать, учитывая, что уравнение крутящего момента
\ [ \ tau = \ frac {3I_2 ^ 2R_2} {s \ omega_s} \]
— это фактически потеря меди в роторе, деленная на скорость скольжения.Если проскальзывание увеличивается, потери должны увеличиваться для поддержания крутящего момента.
На приведенной ниже диаграмме показаны кривые крутящего момента и скорости для 6-полюсного двигателя 230 В, 60 Гц, Y-соединения с различными значениями \ (R_2 \). Следующие параметры схемы являются постоянными: \ (R_1 = 0.50 \ Omega \), \ (X_1 = 0.75 \ Omega \), \ (X_2 = 0.50 \ Omega \), \ (X_m = 100 \ Omega \), \ (f = 60 Гц \), \ (p = 6 \), \ (V_ {LL} = 230 В \)
Рис. 5. Изменение кривых крутящего момента и скорости в зависимости от сопротивления ротораМолекулярный двигатель, пересекающий границу классического туннельного движения к квантовому
Значение
Преобразование ненаправленного ввода энергии в направленное движение в молекулярных масштабах является основой для контролируемых движений в живые организмы.В этом контексте фундаментальные идеи можно получить, исследуя искусственные молекулярные машины в четко определенных условиях. Мы разработали самую маленькую в настоящее время молекулярную машину атомарной точности, ротор которой (C 2 H 2 ) состоит всего из четырех атомов, а функционирование которой мы отслеживали с помощью сканирующей туннельной микроскопии (СТМ). В отличие от всех других упомянутых роторов с поверхностным закреплением, наш ротор характеризуется чрезвычайно высокой степенью направленности, которая не зависит от состояния или положения наконечника СТМ, поэтому определяется исключительно хиральной опорой.Из-за своего сверхмалого размера работа нашего ротора переходит от хорошо зарекомендовавшего себя классического кинетического режима к неожиданному квантовому туннелированию без потери направленности.
Abstract
Надежность, с которой молекулярные моторные белки преобразуют ненаправленную подводимую энергию в направленное движение или транспорт, вдохновила на создание бесчисленных искусственных молекулярных моторов. Мы реализовали и исследовали искусственный молекулярный двигатель с применением сканирующей туннельной микроскопии (СТМ), который состоит из единственного ацетиленового (C 2 H 2 ) ротора, прикрепленного к хиральному атомному кластеру, обеспечиваемому поверхностью PdGa (111), которая действует как статор.Нарушая симметрию пространственной инверсии, статор определяет уникальное направление вращения. В то время как термически активируемое движение является ненаправленным, неупругое туннелирование электронов запускает вращение, где степень направленности зависит от величины напряжения смещения СТМ. Ниже 17 К и напряжения смещения 30 мВ наблюдается постоянная частота вращения, которая несет фундаментальные характеристики квантового туннелирования. Сопутствующая высокая направленность, превышающая 97%, подразумевает сочетание квантовых и неравновесных процессов в этом режиме, что является отличительной чертой макроскопического квантового туннелирования.Таким образом, ацетилен на двигателе PdGa (111) подталкивает молекулярные машины к их крайним пределам не только с точки зрения размера, но и с точки зрения структурной точности, степени направленности и перехода от классического движения к квантовому туннелированию. Таким образом, этот сверхмалый двигатель открывает возможность исследовать в действии , эффекты и источники рассеивания энергии во время туннелирования и, в конечном итоге, сбора энергии в атомных масштабах.
В 1959 году Ричард Фейнман представил масштабирование хранилищ информации и машин до атомарных измерений (1).Оба видения в конечном итоге были реализованы: путем записи информации путем размещения отдельных атомов на поверхности никеля в 1990 году (2) и путем разработки первой искусственной молекулярной машины, управляемой светом, в 1999 году (3). Последний был вдохновлен молекулярными машинами в биологических системах (4, 5) и привел к созданию бесчисленных искусственных молекулярных машин (6–12). Однако большинство синтетических молекулярных машин, хотя и управляются квантовыми процессами, демонстрируют классическую кинетику (13, 14), тогда как работа за счет квантового туннельного движения в значительной степени неуловима.Сканирующая туннельная микроскопия (СТМ) обеспечивает идеальную платформу для исследования динамики атомов и молекул на поверхностях (10–12, 15–22). Однако мало исследований было направлено на достижение контролируемого, независимого от положения наконечника СТМ, направленного движения, которое требует нарушения инверсионной симметрии, что обычно достигается путем адсорбции хиральных молекул на ахиральных поверхностях (10–12, 15). Мы изменили эту концепцию, используя поверхность нецентросимметричных кристаллов PdGa в качестве хирального статора. Это ослабляет геометрические ограничения на молекулу ротора и позволяет направленное движение даже для простых и симметричных молекул, таких как C 2 H 2 .
Отправной точкой нашего исследования является создание четко определенной хиральной поверхности из нецентросимметричного монокристалла, а именно интерметаллического соединения палладий-галлий со стехиометрией 1: 1 (PdGa), демонстрирующего хиральные поверхности с объемными концевыми группами (23). Хиральная структура некоторых из этих поверхностей проявляется в ярко выраженных энантиоселективных адсорбционных свойствах (24). Здесь мы выбираем трехмерную симметричную (1¯1¯1¯) поверхность энантиоморфа PdGa A (23). При соответствующей подготовке в сверхвысоком вакууме он заканчивается слоем, содержащим три атома Pd на элементарную ячейку тригональной поверхности (a0 = 6.95Å), образуя равносторонний треугольник со стороной 3,01 Å ( SI Приложение , рис. S1 и ссылка 25). Симметрия локальной инверсии этого тримера Pd повышается за счет координации шести атомов Ga второго слоя и, кроме того, трех атомов Pd в третьем слое (рис. 1 A и B ). В дальнейшем мы будем обозначать это окончание как Pd 3 .
Рис. 1.Вращение ацетилена на поверхности PdGa: A (1¯1¯1¯) Pd 3 . ( A ) Рисунок ацетилена (C 2 H 2 ) на двигателе Pd 3 .( B ) Атомная структура PdGa: A (1¯1¯1¯) Pd 3 поверхностей с кластером PdGa, действующим как статор, выделены насыщенными цветами. Ротор C 2 H 2 изображен в одной (R a ) из трех эквивалентных адсорбционных конфигураций: R a , R b , R c . В A и B тримеры Pd верхнего слоя (z = 0) изображены ярко-синим цветом, тримеры Ga второго слоя (z = -0,85 Å) — красным, а одиночные атомы Pd третьего слоя (г = -1.61 Å) темно-синего цвета. ( C — G ) Постоянно текущие СТМ изображения C 2 H 2 , адсорбированного на поверхности Pd 3 (T = 5 K; VG = 10 мВ; IT = 50 пА). В C указаны две вращающиеся молекулы, тогда как в D , записанном через 60 секунд после C , вращения молекул не наблюдается. ( E — G ) СТМ изображения одной и той же молекулы ацетилена в трех ее вращательных конфигурациях. В E базовая структура статора PdGa наложена.( H ) Туннельный текущий временной ряд IT (t) (Δt = 100 с; VG = 25 мВ; разрешение по времени 1 мс), измеренный в относительной позиции по отношению к C 2 H 2 , обозначенному красным маркером в G .
На Pd 3 молекулы ацетилена адсорбируются поверх тримеров Pd (26). При отображении с помощью СТМ при 5 К они выглядят как гантели с разделением лепестков около 3 Å в трех симметрично эквивалентных ориентациях с поворотом на 120 ° (рис. 1 E — G ), между которыми они переключаются квази мгновенно ( Инжир.1 C и D ). Молекулы ацетилена прочно закреплены на тримере и обычно диссоциируют перед тем, как их оттолкнуть от тримера с помощью манипуляций с наконечником СТМ.
Мы наблюдали за событиями вращения, записывая временные ряды туннельного тока I T (t) в фиксированном положении наконечника (рис. 1 H ), по аналогии с исследованием STM вращения хирального бутил-метил- сульфид на Cu (111) (10). В последнем случае сообщалось о слабой (≤5%) асимметрии в количестве вращений nCW по часовой стрелке (CW) и против часовой стрелки (CCW), которая предположительно приписывалась хиральным наконечникам STM, поскольку не было корреляции направленности с энантиомерной формой молекулы. был найден.I T (t) на рис. 1 H , записанный в течение Δt = 100 с, демонстрирует циклические последовательности скачков между тремя уровнями (… R A → R B → B C → R A …) с nCCW = 23 скачками в направлении CCW и nCW = 0 в CW, что приводит к частоте f = nCCW + nCWΔt = 0,23 Гц и идеальной направленности dir = 100% ∗ nCCW − nCWnCCW + nCW = 100%. Фильм SV1 показывает серию покадровых изображений STM, свидетельствующих о преобладающем вращении двигателя против часовой стрелки.
Анализируя параметрическую зависимость частоты вращения (рис.2 A — C и SI Приложение , рис. S2) показывает, что этот молекулярный мотор работает в двух различных режимах; туннельный режим (TR), где его частота вращения νT не зависит от температуры T <15 K, напряжения смещения | VG | <30 мВ и тока IT <200 пА, и классический режим (CR), где частота сильно зависит от этих параметры. Несмотря на то, что все экспериментальные данные, представленные на рис. 1, были записаны в TR, мы сначала обсудим CR, где C 2 H 2 вращений могут выборочно приводиться в действие тепловым или электрическим возбуждением.Мы обнаружили, что температурная зависимость частоты вращения при малом смещении (рис. 2 A ) соответствует аррениусовской характеристике (сплошная линия на рис. 2 A ) ν (T) = νT + νAexp (−ΔEBkBT) [ 1] , с νT = 4,5 Гц, νA = 108,7 ± 2,0 Гц (частота попыток) и ΔEB = 27,5 ± 7,1 мэВ (энергетический барьер для вращения). Выше 30 мВ частота увеличивается экспоненциально с увеличением напряжения VG, независимо от полярности (рис. 2 B и C ). В тех же условиях, но при постоянном напряжении смещения степенная зависимость ν∝ITn с n≈1 (рис.2 D ) идентифицирует электронно-стимулированное вращение как одноэлектронный процесс (27). Как мы обсудим позже, параметрическая зависимость частоты вращения и направленности с T, VG и IT очень хорошо воспроизводится кинетической моделью Ланжевена (сплошные линии на рис. 2 B и C ).
Рис. 2.Параметрическая зависимость частоты вращения и последовательности скачков. ( A ) Зависимость частоты вращения от температуры (VG = 10 мВ; IT = 100 пА), B от напряжения смещения для обеих полярностей (T = 5 K; IT = 100 пА), C от напряжения смещения при различные температуры от 5 до 19 К; IT = 100 пА) и D по туннельному току для различных напряжений смещения от 33 до 45 мВ при T = 5 К.В A — D маркеры представляют экспериментальные данные, а сплошные линии получены из кинетической модели ( SI Приложение ). ( E ) Постоянная текущая карта последовательности скачков (js = 3 ∗ nup − ndownnup + ndown = sign (js) ∗ | dir |; n up / down : количество прыжков, увеличивающих / уменьшающих высоту вершины) генерируется из сетки 80 × 80 (1 × 1 нм 2 ) отдельных временных рядов zT (t) высоты кончика, каждый из которых записывается в течение 4 с (4000 точек; VG = 10 мВ; IT = 100 пА).( F ) Смоделированная карта последовательности скачков для 100% вращения против часовой стрелки на основе шаблона движения, показанного в H . ( G ) Частотная карта вращения C 2 H 2 , извлеченная из той же экспериментальной сетки zT (t) E . ( H ) Наша лучшая оценка вращательного движения ацетилена на Pd 3 для полного вращения на 360 ° за шесть шагов по 60 °, показанных путем отслеживания движения одного атома H (1 → 2 → 3 → 1 ′ → 2 ′ → 3 ′ с n и n ′, обозначающими неразличимые конфигурации C 2 H 2 ) с зеленым кружком, указывающим движение центра масс ацетилена.
Прежде чем обсуждать параметрическую зависимость направленности, необходимо пояснить влияние острия СТМ, необходимого для наблюдения за движением. В частности, мы должны убедиться, что нарушение инверсионной симметрии из-за положения наконечника (и, возможно, конструкции наконечника) вблизи двигателя не преобладает над влиянием хиральной подложки при определении направления вращения. Чтобы решить эту проблему, мы измерили 6400 временных рядов zT (t) высоты кончика постоянного тока на сетке из 80 × 80 эквидистантных точек, покрывающих 1 × 1 нм2, вблизи одиночных молекул ацетилена в TR.Анализ всех этих серий zT (t) показывает сложную, регулярную структуру с чередующимися высоконаправленными последовательностями восходящих (красный) и нисходящих (синий) скачков (рис. 2 E ). Этот паттерн полностью подтверждает независимое от положения наконечника однонаправленное вращение молекулы, которое становится очевидным при моделировании и отображении зависимой от положения последовательности скачков, предполагающей циклическое однонаправленное вращение молекулы против часовой стрелки с шагом 60 ° ( SI Приложение , Рис. .S4 – S7). После оптимизации конфигурации молекулы и формы острия в модели отличное согласие моделируемой карты последовательности скачков (рис.2 F ) с экспериментом. Следовательно, мы заключаем, что независимо от положения наконечника, последовательности скачков всегда соответствуют вращению против часовой стрелки. Кроме того, как видно из рис. 2 G , нет явной зависимости νT от положения наконечника, и можно ожидать, что все три вращательные конфигурации C 2 H 2 будут энергетически эквивалентными, исходя из условий проживания. анализ времени в SI Приложение , рис. S8 – S10. Три вращательных состояния становятся энергетически невырожденными только в том случае, если острие подносить очень близко к подложке, так что это значительно изменяет потенциал храповика на поверхности ( SI Приложение , рис.S3). Хотя мы исследовали сотни молекул с десятками различных модификаций наконечника, мы никогда не наблюдали никаких систематических вращений CW в TR или CR, свидетельствующих о том, что только статор определяет направление и направленность вращения. Оценивая 1792 события вращения (nCCW = 1771 и nCW = 21) в TR, мы определяем направленность dir≥96,7% с достоверностью 2σ. Сопоставляя смоделированную карту последовательности скачков с экспериментом, мы идентифицируем вращение C 2 H 2 , которое лучше всего описать как падающий ротор, центр масс которого движется по окружности с радиусом r = 0.5 ± 0,1 Å и момент инерции IC2h3 = 5,62 × 10−46 кгм2 (рис. 2 H ).
Выяснив влияние наконечника, перейдем к обсуждению параметрических зависимостей направленности (рис. 3 A — D ). Температурная зависимость показывает быстрое падение направленности после того, как термически активированные вращения начинают вносить значительный вклад. Сплошная линия на рис. 3 A предполагает, что νT демонстрирует 98% направленность, тогда как термически активированные скачки, описываемые уравнением Аррениуса 1 , являются чисто случайными.Эти случайные события теплового вращения ожидаются, потому что подложка, острие СТМ и, следовательно, молекула находятся в тепловом равновесии и, соответственно, однонаправленное вращение (которое снижает энтропию) запрещено вторым законом термодинамики. При T = 5 K уменьшение направленности также наблюдается для напряжений смещения VG выше ± 35 мэВ (рис. 3 B ). Однако, в отличие от теплового вращения, вращения, вызванные неупругим электронным туннелированием (IET), становятся ненаправленными только постепенно. Это четко наблюдается в режиме сосуществования термического вращения и вращения, индуцированного ИЭП.Как показано на рис. 3 C , независимая от напряжения направленность, составляющая только 10% при T = 19 K и | VG | <30 мВ, может быть значительно увеличена при более высоких | VG | за счет дополнительных направленных вращений ИЭПП. Это увеличение эффективно только в узком окне напряжения, выше которого направленность быстро уменьшается. Напротив, IT-зависимость направленности для фиксированного напряжения является слабой (рис. 3 D ), где небольшое уменьшение с увеличением тока, то есть частоты, объясняется обнаружением двух быстро следующих друг за другом вращений против часовой стрелки как одного ошибочный CW (сплошные линии на рис.3 D ). Отсюда мы заключаем, что направленность остается выше 95% для | VG | <40 мВ даже при большом токе.
Рис. 3. Параметрическая зависимость направленности наномотора. ( A ) Зависимость направленности от температуры (VG = 10 мВ; IT = 100 пА), ( B ) напряжение смещения для обеих полярностей (IT = 100 пА; T = 5 K), ( C ) напряжение смещения при различных температурах от 5 до 19 К (IT = 100 пА) и ( D ) частота вращения, управляемая изменением IT для нескольких VG.В A — D маркеры представляют экспериментальные данные, а сплошные линии в A — C получены из кинетической модели ( SI Приложение ). Сплошными линиями в D показаны смоделированные зависимости постоянной направленности (указаны в скобках) от частоты с учетом конечного временного разрешения эксперимента ( SI Приложение ). ( E ) Схематическое изображение динамики ланжевеновского вращения, полученное для потенциалов храповика с ΔEB = 25 мэВ.( Left ) Диапазон переданной кинетической энергии Ekin для направленного движения, то есть EL Наблюдение направленного движения, вызванного нециклическим, без направления и независимым от положения входом энергии, происходящим из одного события IET, побуждает нас применить вариант смещенной концепции броуновского движения, предложенной Astumian и Hänggi для моделирования лежащего в основе механизма ( 28, 29).Наша модель индуцированного IET вращения предполагает статический, периодический, но асимметричный потенциал U (ϕ) (ϕ = [0,2π], с периодичностью π3) с асимметрией потенциала Rasym, определенной на рис. 3 E , Вставка и SI Приложение , рис. S11. Одиночное событие IET мгновенно возбуждает молекулу из ее основного состояния, и ее траектория ϕ (t) получается из динамики Ланжевена Iϕ¨ = −∂U (ϕ) ∂ϕ − λϕ˙, где I — момент инерции, а λ коэффициент вязкой диссипации (28, 29).В зависимости от Rasym и λ для преодоления барьера слева (т.е. CW) и справа (т.е. CCW) требуются две разные минимальные кинетические энергии EL и ER. Эти энергии являются основой для описания частоты и направленности с помощью кинетической модели ( SI Приложение ). Сопоставление этой кинетической модели с нашими экспериментальными данными на рис. 2 C и 3 C позволяют определять зависящие от температуры EL (T) и ER (T), которые представлены цветными маркерами на рис.3 Е . Из этих значений мы выводим значение Rasym, равное 1,25 Успешно описав богатую феноменологию процессов надбарьерного вращения в CR, неожиданное, почти идеальное однонаправленное вращение C 2 H 2 в TR требует более внимательного рассмотрения.Туннелирование, особенно водородное, — это хорошо известное явление в химии (30) и науке о поверхности (19), и оно играет решающую роль во многих биологических процессах, таких как реакции, катализируемые ферментами (31). Однако приблизительно экспоненциальное уменьшение скорости туннелирования с увеличением массы позволяет достаточно высокие скорости туннелирования тяжелых атомов или молекул только для очень малых высот барьеров и расстояний туннелирования. Несмотря на эти ограничения, сообщалось о многих туннельных переходах на поверхностях с участием тяжелых атомов, таких как кобальт, или небольших молекул (15, 20, 21, 32). В этом отношении туннелирование формальдегида (CH 2 O) между двумя конфигурациями адсорбции на Cu (110), описанное Lin et al. очень близко к вращению C 2 H 2 с точки зрения ΔEB, момента инерции и угла поворота, и, таким образом, дает сравнимые частоты νT (32). В обоих случаях νT критически зависит от состояния наконечника и варьируется от 0,01 до 0,1 Гц для CH 2 O / Cu (110) и от 0,25 до 5 Гц для C 2 H 2 / Pd 3 поверхность .Таким образом, чтобы доказать сильную изотопную зависимость и подтверждающее квантовое туннелирование, мы обратили внимание, что νT для C 2 H 2 , полностью (C 2 D 2 ) и частично дейтерированного ацетилена (C 2 DH) определяются последовательно на одном и том же образце с одним и тем же наконечником STM ( SI, приложение , рис. S15). Рис.4 A показывает результирующие последовательности IT (t) для C 2 H 2 , C 2 DH и C 2 D 2 , которые показывают отношения νT (относительно C 2 H 2 ) из 1: 0.56 (11): 0,24 (5) (C 2 H 2 : C 2 DH: C 2 D 2 ), что мы постоянно наблюдаем с разными наконечниками ( SI Приложение , Таблица ST3 и рис. S16). Это сильное относительное уменьшение νT контрастирует со сравнительно небольшим относительным изменением момента инерции 1: 1.08: 1.2 и, таким образом, указывает на квантовое туннелирование. Тщательное изучение последовательности IT (t) C 2 DH с нарушенной симметрией C 2 показывает, что вращение проходит через шесть, а не через три уровня тока (рис.4 B ), что доказывает, что полное вращение ацетилена действительно требует шести вращений против часовой стрелки на 60 °. Сравнение экспериментально определенных отношений νT с соответствующей частотой туннелирования Вентцеля – Крамерса – Бриллюэна (WKB) ( SI Приложение ) показывает отличное совпадение для высоты барьера ΔEB = 25 мэВ (рис. 4 D ). Квантовое туннельное вращение ацетилена. ( A ) Кривые IT (t) для C 2 H 2 , C 2 DH и C 2 D 2 с особым вниманием к шести различным уровням тока в IT ( t) кривая C 2 DH в B .В C потенциал храповика показан бирюзовым цветом, на основе которого определяются квантовые состояния C 2 H 2 , уровни энергии и частоты туннелирования. Цвет (от черного к желтому) представляет плотность вероятности квантовых состояний. Зависимость νT в приближении ВКБ от момента инерции, нормированного на νT при 5,62 × 10 −46 кгм 2 (C 2 H 2 ), отображается в виде сплошных линий в D для несколько ΔEB ( SI Приложение ).Черные маркеры представляют экспериментальные νT для C 2 H 2 , C 2 DH и C 2 D 2 , каждый из которых нормализован к одному из C 2 H 2 . Квантовые туннельные вращения, сопровождающиеся высокой направленностью 97,7%, позволяют оценить изменение энтропии одного туннельного вращения из экспериментальных вероятностей вращения CCW и CW, заданных как ΔS = −kBln (ppCCW / pCW) ≈ − kBln (100 /1)≈−0,4meVK. Это означает, что направленное вращение в TR должно быть неравновесным процессом с диссипацией энергии ΔQ> 2 мэВ при 5 K и ΔQ> 6 мэВ при 15 K за оборот.Поскольку эти значения ΔQ порядка разности энергий двух мод фрустрированного вращения C 2 H 2 (например, ℏω10 − ℏω00 = 6,8 мэВ; Рис. 4 C и SI Приложение , Рис. .S14 и таблица ST2), можно было бы предположить, что необходимое неравновесное туннелирование происходит через возбуждение из основного состояния в связанную вращательную моду, как было предложено Nacci et al. (21). Мы оцениваем максимальное рассеивание мощности в 100 мэВ / с на двигатель, принимая в качестве верхней границы частоту туннелирования 10 Гц.С другой стороны, СТМ, необходимый для контроля вращения, локально рассеивает не менее 3 × 10 6 мэВ / с даже при самых низких настройках туннельного тока 1 пА и смещения 0,5 мВ. Мы по-прежнему наблюдаем постоянную частоту вращения с сохраняющейся высокой направленностью при таких экстремальных настройках. Следовательно, острие СТМ, по-видимому, имеет решающее значение для вывода системы из равновесия также в режиме туннельного движения. В заключение, сильно направленное вращение C 2 H 2 на хиральных поверхностях PdGa {111} Pd 3 демонстрирует богатую феноменологию, наиболее ярко характеризующуюся беспрецедентно высокой направленностью и малым размером двигателя.Его ротор (C 2 H 2 ) и статор (кластер Pd 3 -Ga 6 -Pd 3 ), показанный на рис.1. A состоит всего из 16 атомов для образования однонаправленного шести состояний. циклический молекулярный двигатель (рис. 4 B ), через который он непрерывно циклически работает, питаясь исключительно отдельными электронами. Это контрастирует с описанными двигателями, приводимыми в действие светом или химическими реакциями, поскольку для прежнего требуется согласованная активация, управляемая тепловым и световым излучением. Последнее обычно требует круговорота химической среды для завершения одного цикла.В классическом режиме мы могли установить ланжевеновскую кинетическую модель движения, описывающую частоту и направленность в зависимости от температуры, напряжения смещения СТМ и туннельного тока. Модель обеспечивает надежные значения асимметрии вращательного потенциала Rasym и температурную зависимость коэффициента вязкой диссипации λ (T), связывающую работу этой молекулярной машины с атомным трением. Отрицательное изменение энтропии, связанное с высокой направленностью вращения, также наблюдаемое в туннельном режиме, ставит под сомнение понимание этой простой циклической машины с точки зрения диссипативной квантовой динамики туннелирования (33).В будущем, возможно, появится возможность преобразовывать энергию с помощью принудительных возбуждений, например, оптических или IET, в направленное движение и, таким образом, исследовать сбор энергии на минимально возможном масштабе длины. Все эксперименты проводились в условиях сверхвысокого вакуума с базовым давлением ниже 5 × 10 −11 мбар с использованием низкотемпературного СТМ Omicron, работающего при 5 К. Измерения проводились с различными наконечниками, включая 80: 20 Pt / Ir наконечник, Tungsten STM и Tungsten Q + Sensor.Мы не обнаружили систематических различий в экспериментальных результатах, полученных с разными наконечниками. Поверхность кристалла PdGa была приготовлена путем многократных циклов напыления и отжига (напыление: Ar + , 1 кэВ; отжиг: 20 мин при 870 K). Перед дозированием C 2 H 2 , который был приобретен у PanGas с чистотой 99,6%, газовая линия была предварительно очищена продувкой газом или циклическим замораживанием-оттаиванием (77 K). В случае C 2 D 2 , приобретенного из изотопов CDN с чистотой 99% (C 2 DH является примесью), предварительную очистку не проводили, поскольку газ разливался в баллон при атмосферном давлении.Дозирование обоих газов осуществлялось путем заполнения камеры через сливной клапан под давлением 2 × 10 -9 мбар. Удалив образец из ступени СТМ при 5 К, подвергая его воздействию ацетилена вне криостата в течение короткого времени (обычно 10–20 с), были достигнуты наиболее эффективные условия экспонирования. Наборы данных, созданные и / или проанализированные в ходе текущего исследования, доступны у соответствующего автора по разумному запросу. Моделирование, использованное в данном исследовании, было выполнено с использованием специального кода на платформе Wave Metrics IGOR Pro.Подробную информацию об этом коде можно получить у соответствующего автора по разумному запросу. Мы благодарим Р. Фазеля за внимательное рассмотрение рукописи и Карло Пинедоли за выполнение расчетов ротора методом DFT. Мы признательны Швейцарскому национальному научному фонду за финансирование в рамках проекта SNSF 159690. Вклад авторов: S.S., O.G., J.P. и R.W. разработали исследование; S.S., O.G., J.P. и R.W. проводили исследования; С.С., О. Г., Дж. П., Х. Б. проанализированные данные; и S.S., O.G., H.B. и R.W. написали статью. Авторы заявляют об отсутствии конкурирующей заинтересованности. Эта статья представляет собой прямое представление PNAS. Эта статья содержит вспомогательную информацию в Интернете по адресу https://www.pnas.org/lookup/suppl/doi:10.1073/pnas.14117/-/DCSupplemental. YD — 2 S PLUS — высоко расположенный двигатель.Поднимая центр тяжести задней части выше, чем у серии YD-2, мы вызываем крен и увеличиваем сцепление с задней частью. Однако, просто установив двигатель в высокое положение, эффективность упражнений упадет из-за выхода из поворота или поворота назад, время ускорения будет задержано, или машина станет трудной в управлении. Таким образом, в этом «YD — 2 S», полностью новая конструкция коробки передач, избегающая перегрузки двигателя больше, чем необходимо, и возможность выбора положения двигателя из трех мест спереди и сзади, можно реализовать заднюю тягу. Нам удалось в обеспечении. Традиционная компоновка двигателя с высоким креплением на YD-2 была вызвана сторонними преобразованиями, они просто слишком меняют расположение двигателя, добавляя дорогие карбоновые детали с нелепым внешним видом. YD — 2S позволяет выбрать 3 типа положений двигателя, чтобы они подходили для другого выхода, и управлять им нелегко. лучший ролевой центр, обеспечивающий наилучшее сцепление с дорогой на скользкой дороге. Внутри специальной коробки передач, которая передает привод от цилиндрической шестерни через нижнюю часть двигателя к задней части.4-ступенчатая трансмиссия также подходит для дорог с низкой муфтой, поскольку тяговое усилие сзади увеличивается с увеличением крутящего момента при ускорении. Задний дифференциал оснащен 4-х шестеренчатым дифференциалом. Задний дифференциал имеет 4 ведущие шестерни. Полностью новая конструкция 4-й трансмиссии позволяет втиснуться в нижнюю часть двигателя, и это тип, который увеличивает тяговое усилие сзади по мере увеличения крутящего момента, в отличие от гусеницы с низким коэффициентом трения. Изменяя положение крепления монтажной пластины двигателя, можно выбрать двигатель из трех положений спереди и сзади.Это делает возможной точную регулировку баланса веса, можно достичь оптимального баланса в зависимости от дорожного покрытия для движения. Так как расположение двигателя может быть изменено на 3 положения вращения на монтажной пластине двигателя, баланс веса автомобиля также будет регулироваться, чтобы найти наилучшую настройку для сохранения максимального угла и скорости на любой скользкой поверхности. Несмотря на то, что соответствующая батарея представляет собой только короткую батарею Li-po, вы можете выбрать различные способы загрузки батареи в соответствии с фиксированным положением фиксатора батареи.В дополнение к горизонтальной установке батареи, в дополнение к вертикальной установке, вы можете выбрать одно из трех положений впереди и сзади в случае горизонтального размещения, переднее и заднее сцепление и т. Д. Можно отрегулировать путем изменения баланса веса. Расположение будет вертикальным, горизонтальным передним / средним / задним, чтобы завершить точную настройку баланса веса и тяги вперед / назад. Окружение рулевого управления такое же, как у обычной серии YD-2.С уже достигнутым признанным коэффициентом Аккермана мы выйдем на передний план. Конечно, можно использовать дополнительные детали, такие как алюминий. Лучшая дозировка Акермана обеспечивает передний привод. Алюминиевые опциональные детали могут использоваться совместно с серией YD-2. ※ Изображение является собранным справочным примером. Из-за прототипа он может отличаться от реального продукта. Монтажный комплект Материалы и методы
Доступность данных и материалов.
Благодарности
Footnotes
Yokomo YD-2S RWD 1/10 Competition RC Drift Car Kit (LAYDOWN TRANS HIGH MOTOR) [Yokomo] DP-YD2S
Самая большая особенность
На фотографиях представлены собранные образцы на прототипе. Он может быть изменен в производственной версии без предварительного уведомления.
Все, что вам понадобится для путешествий: 2-канальный комплект пропо (передатчик, приемник, регулятор скорости, сервопривод), аккумулятор (2-элементный Li-po), зарядное устройство, шина, колесо, мотор, корпус, поликарбонатная краска
В комплект не входят кузов, колеса, шины, двигатель, аккумуляторы, ведущая шестерня и прочая электроника ПДУ