ГЛОНАСС и GPS: какие отличия и что выбрать
Долгое время созданная в США система глобального геопозиционирования GPS была единственной доступной рядовым пользователям. Но даже с учетом того, что точность гражданских приборов была изначально ниже по сравнению с военными аналогами, ее с головой хватало и для навигации, и для отслеживания координат автомобилей.
Однако еще в Советском Союзе была разработана собственная система определения координат, известная сегодня как ГЛОНАСС. Несмотря на сходный принцип работы (используется расчет временных интервалов между сигналами от спутников), ГЛОНАСС имеет серьезные практические отличия от GPS, обусловленные и условиями разработки, и практической реализацией.
- ГЛОНАСС отличается большей точностью в условиях северных регионов. Это объясняется тем, что значительные войсковые группировки СССР, а впоследствии и России, были расположены именно на севере страны. Поэтому и механика ГЛОНАСС рассчитывалась с учетом точности в таких условиях.

- Для бесперебойной работы системе ГЛОНАССне требуются корректирующие станции. Для обеспечения точности GPS, спутники которой неподвижны относительно Земли, необходима цепочка геостационарных станций, отслеживающих неизбежные отклонения. В свою очередь, спутники ГЛОНАСС подвижны относительно Земли, поэтому проблема корректировки координат отсутствует изначально.
Для гражданского применения эта разница ощутима. Например, в Швеции еще 10 лет назад активно применялась именно ГЛОНАСС, несмотря на большое количество уже существовавшей аппаратуры под GPS. Немалая часть территории этой страны лежит на широтах российского Севера, и преимущества ГЛОНАСС в таких условиях очевидны: чем меньше склонение спутника к горизонту, тем при равной точности оценки временных интервалов между их сигналами (задаваемой аппаратурой навигатора) вернее можно рассчитать координаты и скорость движения.
Так что же лучше?Достаточно оценить современный рынок телематических систем, чтобы получить правильный ответ на этот вопрос.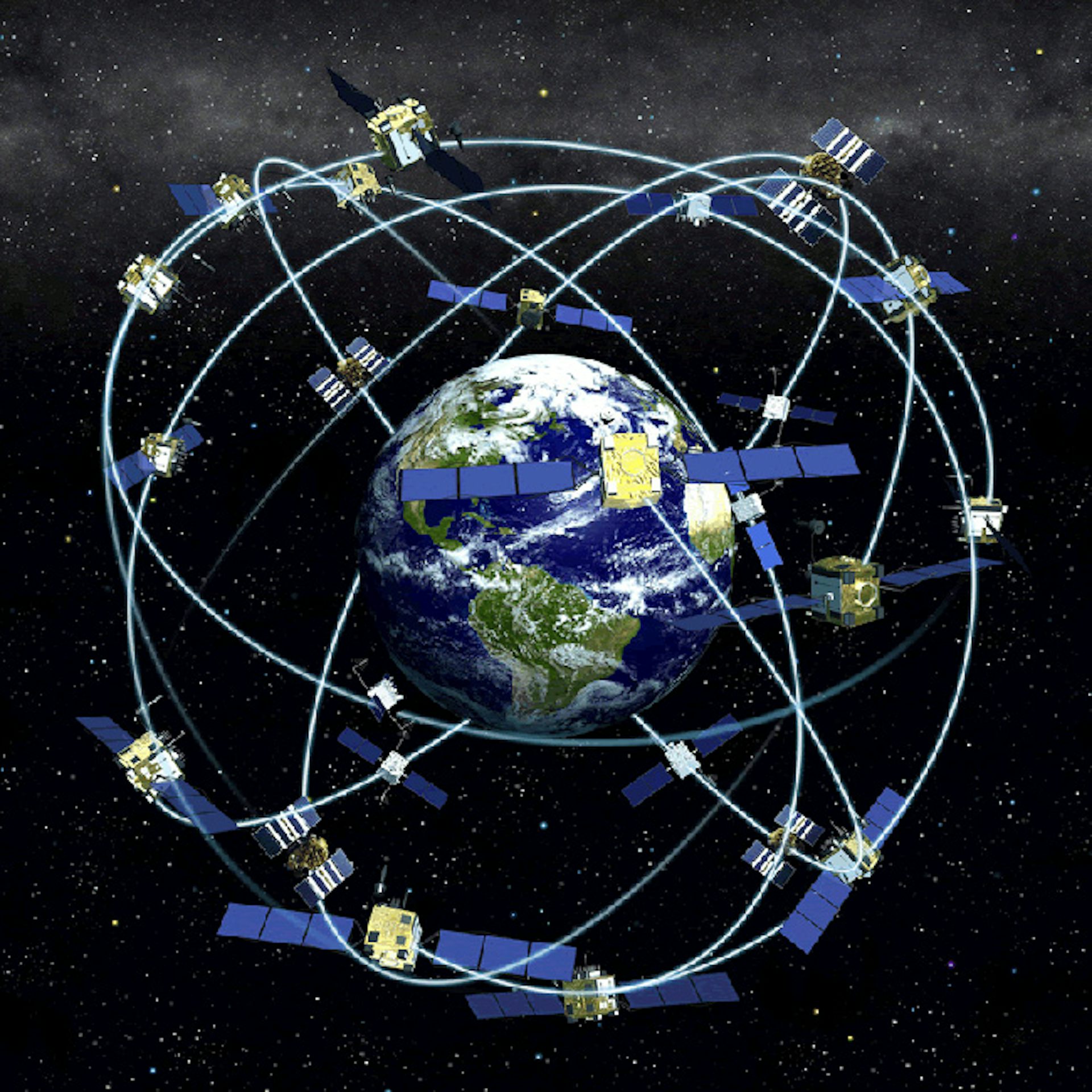 Используя в навигационной или охранной системе подключение к спутникам GPS и ГЛОНАСС одновременно, можно добиться трех главных преимуществ.
Используя в навигационной или охранной системе подключение к спутникам GPS и ГЛОНАСС одновременно, можно добиться трех главных преимуществ.
- Высокая точность. Система, анализируя текущие данные, может выбрать наиболее верные из имеющихся. Например, на широте Москвы максимальную точность сейчас обеспечивает GPS, в то время как в Мурманске по этому параметру лидером станет ГЛОНАСС.
- Максимальная надежность. Обе системы работают на разных каналах, поэтому, столкнувшись с преднамеренным глушением или посторонним засорением помехами эфира в диапазоне GPS (как в более распространенном), система сохранит возможность геопозиционирования по сети ГЛОНАСС.
- Независимость. Так как и GPS, и ГЛОНАСС изначально являются военными системами, пользователь может столкнуться с лишением доступа к одной из сетей. Для этого разработчику достаточно ввести программные ограничения в реализацию протокола связи. Для российского потребителя ГЛОНАСС становится в какой-то мере резервным способом работы в случае недоступности GPS.

Именно поэтому системы «Цезарь Сателлит», предлагаемые нами, во всех модификациях используют именно двойное геопозиционирование, дополненное отслеживанием координат по базовым станциям сотовой связи.
Как работает действительно надежное геопозиционированиеРассмотрим работу надежной системы отслеживания GPS/ГЛОНАСС на примере Cesar Tracker A.
Система находится в спящем режиме, не передавая данные в сотовую сеть и отключив приемники GPS и ГЛОНАСС. Это необходимо для максимально возможного сбережения ресурса встроенного аккумулятора, соответственно, обеспечения наибольшей автономности системы, защищающей Ваш автомобиль. В большинстве случаев аккумулятора хватает на 2 года работы. Если Вам нужно обнаружить местонахождение своего автомобиля, например при угоне, необходимо обратиться в центр безопасности «Цезарь Сателлит». Наши сотрудники переводят систему в активное состояние и получают данные о местонахождении авто.
Во время перехода в активный режим одновременно происходят три независимых процесса:
- Срабатывает приемник GPS, анализируя координаты по своей программе геопозиционирования. Если за заданный промежуток времени обнаружено менее трех спутников, то система считается недоступной. Аналогично происходит определение координат по ГЛОНАСС-каналу.
- Трекер сравнивает данные от обеих систем. Если в каждой было обнаружено достаточное количество спутников, трекер выбирает данные, которые считает более достоверными и точными. Это особенно актуально при активном радиоэлектронном противодействии – глушении или подмене сигнала GPS.
- GSM-модуль обрабатывает данные геопозиционирования по LBS (базовым станциям сотовой связи). Этот способ считается наименее точным и используется, только если и GPS, и ГЛОНАСС недоступны.
 Если за заданный промежуток времени обнаружено менее трех спутников, то система считается недоступной. Аналогично происходит определение координат по ГЛОНАСС-каналу.
Если за заданный промежуток времени обнаружено менее трех спутников, то система считается недоступной. Аналогично происходит определение координат по ГЛОНАСС-каналу.Таким образом, современная система отслеживания имеет тройную надежность, применяя три системы геопозиционирования отдельно. Но, естественно, максимальную точность обеспечивает именно поддержка GPS/ГЛОНАСС в конструкции трекера.
Применение в системах мониторингаВ отличие от маяков-закладок системы мониторинга, применяемые на коммерческом транспорте, осуществляют постоянное отслеживание местоположения автомобиля и его текущей скорости. При таком применении преимущества двойного геопозиционирования GPS/ГЛОНАСС раскрываются еще полнее. Дублирование систем позволяет:
При таком применении преимущества двойного геопозиционирования GPS/ГЛОНАСС раскрываются еще полнее. Дублирование систем позволяет:
- поддерживать мониторинг при кратковременных проблемах с приемом сигнала от GPS или ГЛОНАСС;
- сохранять высокую точность независимо от направления рейса. Применяя систему наподобие CS Logistic GLONASS PRO, можно уверенно осуществлять рейсы от Чукотки до Ростова-на-Дону, сохраняя полный контроль над транспортом на протяжении всего маршрута;
- защищать коммерческий транспорт от вскрытия и угона. Серверы «Цезарь Сателлит» в режиме реального времени получают информацию о времени и точном месте автомобиля;
- эффективно противодействовать угонщикам. Система сохраняет во внутренней памяти максимально возможный объем данных даже при полной недоступности канала связи с сервером. Информация начинает передаваться при малейшем прерывании глушения радиоэфира.
Выбирая систему GPS/ГЛОНАСС, Вы обеспечиваете себе наилучшие сервисные и охранные возможности в сравнении с системами, использующими только один из способов геопозиционирования.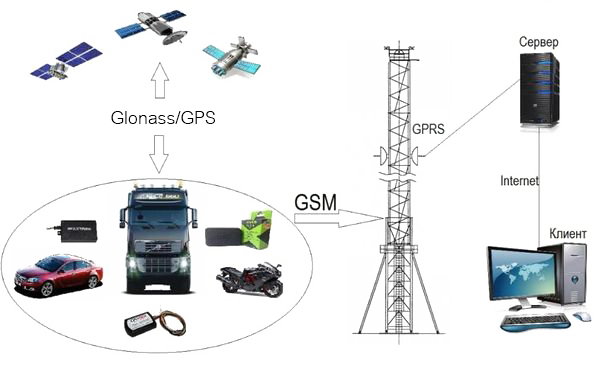
GPS Глонасс — ключевые особенности и различия
В последнее время все чаще в вопросах, касающихся навигационных систем и сервисов, упоминается GPS ГЛОНАСС. Сегодня навигация ГЛОНАСС GPS наращивает свою популярность, как среди индивидуальных лиц, так и в рядах частных и государственных компаний. Что стало причиной подобного явления: обычное любопытство по отношению к новшеству или более обоснованный выбор? Данный вопрос требует детального рассмотрения, и без небольшого исторического экскурса нам не обойтись.
Система GPS ГЛОНАСС – начало начал
До недавнего времени выбирать между навигационными системами ГЛОНАСС или GPS, что лучше, было просто неактуально, ввиду безоговорочного лидерства последней. Это, можно сказать, был обусловлено исторически. Отставание ГЛОНАСС, разрабатываемой для Советского Союза, от американской GPS было изначальным. Обе эти системы были предусмотрены для оборонных целей каждого из государств и разрабатывались в 80-х годах ХХ века, стой разницей, что США стартовали в «навигационной гонке» на 8 лет раньше.
Спутниковые системы GPS и ГЛОНАСС: преимущества и недостатки
Интерес к ГЛОНАСС и разработки в этой области возродились в начале 2000-х годов. В результате, сегодня российская навигационная система по многим параметрам сравнялась с GPS, а по некоторым даже превзошла. Безусловно, разработчикам ГЛОНАСС необходимо усовершенствовать еще множество нюансов. К примеру, сократить ошибки навигационных определений и повысить точность позиционирования объектов. Сейчас точность ГЛОНАСС и GPS составляет 4-7 м (при использовании в среднем 7-8 спутников) и 2-5 м (при использовании 6-11 спутников) соответственно.
Еще одним существенным недостатком ГЛОНАСС является значительно меньший срок эксплуатации спутников. При этом имеются и превосходства над американской навигационной системой. Российские спутники в орбитальном положении не имеют резонанса с движением Земли, поэтому вспомогательная корректировка им не требуется. Оптимальные параметры орбиты делают ГЛОНАСС безоговорочным лидером при работе в приполярных широтах.
Российские спутники в орбитальном положении не имеют резонанса с движением Земли, поэтому вспомогательная корректировка им не требуется. Оптимальные параметры орбиты делают ГЛОНАСС безоговорочным лидером при работе в приполярных широтах.
Спутниковая навигация GPS ГЛОНАСС стала своеобразным гибридом и воплотила преимущества обоих систем. Стоит также отметить, что практически все устройства, как любительского, так и профессионального уровня, работающие на основе ГЛОНАСС, принимают и сигналы GPS, поэтому вопрос «чем отличается ГЛОНАСС от ГЛОНАСС GPS» является неактуальным.
Спутниковые навигационные системы GPS и ГЛОНАСС: работа в тандеме
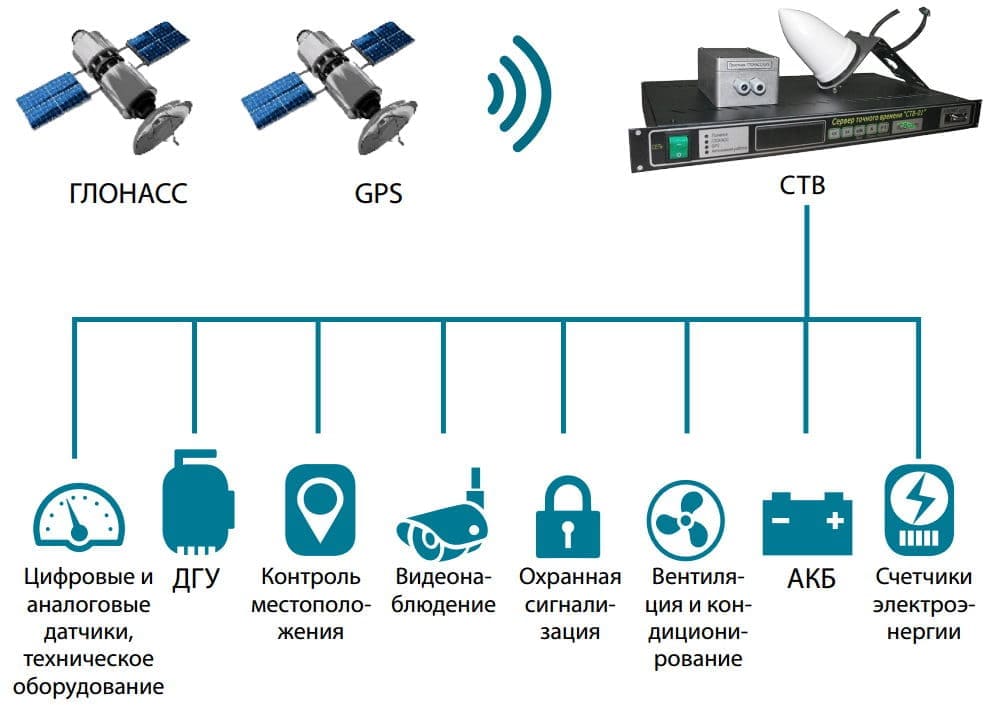
Спутниковые системы навигации GPS и ГЛОНАСС применяются для определения местоположения различных объектов и прочих вспомогательных сведений: скорость и направление движения, высота, численность спутников и так далее. Прием и передача параметров для спутникового мониторинга GPS ГЛОНАСС
 Принятую информацию это устройство может транслировать с периодическими интервалами с помощью GPRS на сервер либо в качестве SMS уведомлений с содержанием интересующих координат или ссылок на сервис, предоставляющий возможность просмотреть координаты непосредственно на карте.
Принятую информацию это устройство может транслировать с периодическими интервалами с помощью GPRS на сервер либо в качестве SMS уведомлений с содержанием интересующих координат или ссылок на сервис, предоставляющий возможность просмотреть координаты непосредственно на карте.
Разновидности GPS ГЛОНАСС контроллеров
Спутниковый GPS ГЛОНАСС контроль осуществляется с помощью трекеров двух классов:
- персональный трекер используется для отслеживанием людей и домашних животных;
- автомобильный ГЛОНАСС GPS контроль стал возможен благодаря станционному прибору, который синхронизируется с бортовой сетью автотранспортного средства. Такой трекер зачастую может подключать дополнительные опции: датчик контроля температуры, топлива и так далее. Разновидностью автотрекеров считаются скрытые маячки и закладки, которые работают автономно от батареек.
Многие контроллеры обладают кнопкой сигнала SOS и возможностью прослушивания в небольшом радиусе вокруг устройства, что существенно расширяет область применения GPS ГЛОНАСС.
GPS транспорта, ГЛОНАСС или GPS ГЛОНАСС мониторинг
Безусловно, двухсистемный мониторинг автотранспорта ГЛОНАСС GPS значительно эффективнее, нежели каждая из навигационных систем по отдельности. Гибридный трекер успешно справляется с приемом-передачей сигналов независимо от местоположения объекта и погодных условий. Трекеры, оборудованные модулем спутниковой связи, могут транслировать данные из любой точки земного шара. Для жителей мегаполисов и крупных городов GPS ГЛОНАСС система мониторинга является прекрасной альтернативой односистемной навигации. Дело в том, что в пределах высотной регулярной застройки возможности спутникового слежения существенно сокращаются, а применение двух навигационных систем одновременно, то есть GPS ГЛОНАСС мониторинг, качественно улучшает возможности пользователей.
Применение GPS ГЛОНАСС
Система мониторинга транспорта GPS ГЛОНАСС позволяет эффективно контролировать:
- передвижение транспорта автопарка;
- перевозку грузов;
- расход топлива;
- километраж;
- личное автотранспортное средство;
- сдаваемую в аренду технику и так далее.
Благодаря возможностям, которые открывает гибридная система навигации, вы сможете успешно оптимизировать логистическое направление на своем предприятии, что приведет к существенной экономии, как денежных средств, так и времени.
Мониторинг транспорта GPS ГЛОНАСС: преимущества внедрения
Согласно статистическим данным и практическому опыту компаний, применяющих в своей деятельности навигационную систему GPS/ГЛОНАСС, экономический эффект использования двухсистемного спутникового слежения характеризуют такие показатели:
- значительное снижение расходов на техобслуживание и топливо благодаря оптимизации маршрутов и устранению вероятности нецелевого пробега автотранспортных средств;
- сокращение урона, обусловленного кражами грузов и угоном авто;
- улучшение качества и расширение возможностей транспортного обслуживания клиентов. Способность оперативно реагировать на запросы и увеличение ассортимента услуг, в свою очередь, влекут привлечение новых клиентов;
- оптимизация планирования рабочего процесса благодаря наличию точных данных о пробеге автотранспорта и минимизация затрат на его же ремонт;
- возможность формирования адекватной системы мотивации, поощряющей эффективное использование рабочего времени, транспорта, расходных материалов и спецтехники. При этом материальное стимулирование и справедливое поощрение является отличным способом повышения производительности труда персонала.
 При этом материальное стимулирование и справедливое поощрение является отличным способом повышения производительности труда персонала.
При этом материальное стимулирование и справедливое поощрение является отличным способом повышения производительности труда персонала.Сегодня приобретение такой навигации становится реальной необходимостью, как для частных лиц, так и для различных компаний. GPS ГЛОНАСС купить, установить, а также получить доступ к системе на протяжении одной недели возможно с помощью нашей компании. Мы уже не первый год специализируемся на системах спутникового слежения, что устраняет любые сомнения в нашей квалификации.
Разница ГЛОНАСС и GPS
В мире существует две навигационные системы — ГЛОНАСС и GPS.ГЛОНАСС расшифровывается как Глобальная Навигационная Спутниковая Система, являющаяся системой спутниковой навигации планетарного масштаба. Она предназначена для определения координат пользователя на земной поверхности или в околоземном пространстве. Разработка ГЛОНАСС началась в далёком 1982г. в СССР, через несколько лет проект был заморожен и вновь введен в строй в двухтысячных годах.
GPS («Global Positioning System») – всемирная система позиционирования, разработкой которой занимается Министерство обороны Соединённых Штатов. Этот проект был запущен в 1993г. На сегодняшний день, сигналы сети GPS-спутников охватывают всю планету, это система навигации, которая является полностью общепланетарной. Модулями GPS оснащаются даже самые дешёвые смартфоны.

ГЛОНАСС
ГЛОНАСС — спутники вращаются на орбитах высотой порядка 19 тысяч км., причем их вращение не синхронизировано с вращением Земли, поэтому они более стабильны, а их координаты определяются более точно и почти не требуют дополнительных корректировок. Зона покрытия их охватывает территорию РФ и большую часть территории земного шара. Предельная точность позиционирования высокая и составляет около 2-4 метров.
GPS
В GPS-систему входят три сегмента: управляющий, космический и пользовательский. Управляющий представляет собой главную станцию управления и сеть мониторинговых объектов, к космическому относятся выведенные на орбиту спутники, к пользовательскому – все эксплуатируемые GPS-приемники (и выполняющие научные задачи, и частные)..png)
Группировка спутников в настоящее время насчитывает 32 аппарата, из них 31 действующий. Стандартная точность определения координат – 5-8м, при использовании корректирующих поправок точность увеличивается до 1-2м.
В настоящее время GPS-навигация более популярна в мире, чем ГЛОНАСС. Во многом это связано с тем, что активное внедрение и развитие GSM началось гораздо раньше, а ГЛОНАСС-работы были свернуты. Приемники GSM очень компактны, ими оснащаются практически все планшеты, недорогие смартфоны.
В некоторых регионах планеты можно наблюдать более точную работу спутников GPS, в некоторых спутников ГЛОНАСС, таким образом, для получения максимально точного позиционирования безусловно идеальным вариантом будет приобретение смартфонов с совместной поддержкой ГЛОНАСС и GPS, которыми и оснащаются мобильные телефоны Highscreen.
Каталог смартфонов Хайскрин
Официальный магазин производителя мобильных телефонов Highscreen hs-store. ru
ru
Принципы спутниковой навигации
Космический сегмент
Космический сегмент, состоящий из навигационных спутников, представляет собой совокупность источников радионавигационных сигналов, передающих одновременно значительный объем служебной информации. Основные функции каждого спутника — формирование и излучение радиосигналов, необходимых для навигационных определений потребителей и контроля бортовых систем спутника.
Наземный сегмент
В состав наземного сегмента входят космодром, командно-измерительный комплекс и центр управления. Космодром обеспечивает вывод спутников на требуемые орбиты при первоначальном развертывании навигационной системы, а также периодическое восполнение спутников по мере их выхода из строя или выработки ресурса. Главными объектами космодрома являются техническая позиция и стартовый комплекс. Техническая позиция обеспечивает прием, хранение и сборку ракет-носителей и спутников, их испытания, заправку и состыковку. В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
В число задач стартового комплекса входят: доставка носителя с навигационным спутником на стартовую площадку, установка на пусковую систему, предполетные испытания, заправка носителя, наведение и пуск.
Командно-измерительный комплекс служит для снабжения навигационных спутников служебной информацией, необходимой для проведения навигационных сеансов, а также для контроля и управления ими как космическими аппаратами.
Центр управления, связанный информационными и управляющими радиолиниями с космодромом и командно-измерительным комплексом, координирует функционирование всех элементов спутниковой навигационной системы.
Пользовательский сегмент
В пользовательский сегмент входит аппаратура потребителей. Она предназначается для приема сигналов от навигационных спутников, измерения навигационных параметров и обработки измерений. Для решения навигационных задач в аппаратуре потребителя предусматривается специализированный встроенный компьютер. Разнообразие существующей аппаратуры потребителей обеспечивает потребности наземных, морских, авиационных и космических (в пределах ближнего космоса) потребителей.
Современная спутниковая навигация основывается на использовании принципа беззапросных дальномерных измерений между навигационными спутниками и потребителем. Это означает, что потребителю передается в составе навигационного сигнала информация о координатах спутников. Одновременно (синхронно) производятся измерения дальностей до навигационных спутников. Способ измерений дальностей основывается на вычислении временных задержек принимаемого сигнала от спутника по сравнению с сигналом, генерируемым аппаратурой потребителя.
На рисунке приведена схема определений местоположения потребителя с координатами x, y, z на основе измерений дальности до четырех навигационных спутников. Цветными яркими линиями показаны окружности, в центре которых расположены спутники. Радиусы окружностей соответствуют истинным дальностям, т.е. истинным расстояниям между спутниками и потребителем. Цветные неяркие линии – это окружности с радиусами, соответствующими измеренным дальностям, которые отличаются от истинных и поэтому называются псевдодальностями. Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
Истинная дальность отличается от псевдодальности на величину, равную произведению скорости света на уход часов b, т.е. величину смещения часов потребителя по отношению к системному времени. На рисунке показан случай, когда уход часов потребителя больше нуля – то есть часы потребителя опережают системное время, поэтому измеренные псевдодальности меньше истинных дальностей.
В идеальном варианте, когда измерения производятся точно и показания часов спутников и потребителя совпадают для определения положения потребителя в пространстве достаточно произвести измерения до трех навигационных спутников.
В действительности показания часов, которые входят в состав навигационной аппаратуры потребителя, отличаются от показаний часов на борту навигационных спутников. Тогда для решения навигационной задачи к неизвестным ранее параметрам (три координаты потребителя) следует добавить еще один — смещение между часами потребителя и системным временем. Отсюда следует, что в общем случае для решения навигационной задачи потребитель должен «видеть», как минимум, четыре навигационных спутника.
Для функционирования навигационных спутниковых систем необходимы данные о параметрах вращения Земли, фундаментальные эфемериды Луны и планет, данные о гравитационном поле Земли, о моделях атмосферы, а также высокоточные данные об используемых системах координат и времени.
Геоцентрические системы координат — системы координат, начало которых совпадает с центром масс Земли. Их также называют общеземными или глобальными.
Для построения и поддержания общеземных систем координат используются четыре основных метода космической геодезии:
- радиоинтерферометрия со сверхдлинной базой (РСДБ),
- лазерная локация космических аппаратов (SLR),
- доплеровские измерительные системы (DORIS),
- навигационные измерения космических аппаратов ГЛОНАСС и других ГНСС.
Международная земная система координат ITRF является эталоном земной системы координат.
В современных навигационных спутниковых системах используются различные, как правило национальные, системы координат.
| Навигационная система | Система координат |
|---|---|
| Система координат ГЛОНАСС | ПЗ-90 (Параметры Земли 1990 года) |
| Система координат GPS | WGS-84 (World Geodetic System) |
| Система координат ГАЛИЛЕО | GTRF (Galileo Terrestrial Referenfce Frame) |
| Система координат БЕЙДОУ | CGCS2000 (China Geodetic Coordinate System 2000) |
| Система координат QZSS | JGS (Japanese geodetic system) |
| Система координат NavIC | WGS-84 (World Geodetic System) |
В соответствии с решаемыми задачами применяются два типа систем времени: астрономические и атомные.
Системы астрономического времени основаны на суточном вращении Земли. Эталоном для построения шкал астрономического времени служат солнечные или звездные сутки, в зависимости от точки небесной сферы, по которой производится измерение времени.
Всемирное время UT (Universal Time) – это среднее солнечное время на гринвическом меридиане.
Всемирное координированное время UTC синхронизировано с атомным временем и является международным стандартом, на котором базируется гражданское время.
Атомное время (TAI) — время, в основу измерения которого положены электромагнитные колебания, излучаемые атомами или молекулами при переходе из одного энергетического состояния в другое. В 1967 году на Генеральной конференции мер и весов атомная секунда представляет собой переход между сверхтонкими уровнями F=4, M=0 и F=3, M=0 основного состояния 2S1/2 атома цезия-133, не возмущённого внешними полями, и что частоте этого перехода приписывается значение 9 192 631 770 Герц.
Спутниковая радионавигационная система является пространственно-временной системой с зоной действия, охватывающей всё околоземное пространство, и функционирует в собственном системном времени. Важное место в ГНСС отводится проблеме временной синхронизации подсистем. Временная синхронизация важна и для обеспечения заданной последовательности излучения сигналов всех навигационных спутников. Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Она обусловливает возможность применения пассивных дальномерных (псевдодальномерных) методов измерений. Наземный командно-измерительный комплекс обеспечивает синхронизацию шкал времени всех навигационных КА путем их сверки и коррекции (непосредственной и алгоритмической).
Навигационных радиосигналы
При выборе типов и параметров сигналов, используемых в спутниковых радионавигационных системах, учитывается целый комплекс требований и условий. Сигналы должны обеспечивать высокую точность измерения времени прихода (задержки)
сигнала и его доплеровской частоты и высокую вероятность правильного декодирования навигационного сообщения. Также сигналы должны иметь низкий уровень взаимной корреляции для того,
чтобы сигналы разных навигационных космических аппаратов надежно различались навигационной аппаратурой потребителей. Кроме того, сигналы ГНСС должны максимально эффективно использовать отведенную
полосу частот при малом уровне внеполосного излучения, обладать высокой помехоустойчивостью.
Почти все существующие навигационные спутниковые системы, за исключением индийской системы NAVIC, используют для передачи сигналов диапазон L. Система NAVIC будет излучать сигналы дополнительно и в S диапазоне.
Диапазоны, занимаемые различными навигационными спутниковыми системами
Виды модуляции
По мере развития спутниковых навигационных систем изменялись используемые виды модуляции радиосигналов.
В большинстве навигационных систем изначально использовались исключительно сигналы с бинарной (двухпозиционной)
фазовой модуляцией – ФМ-2 (BPSK). В настоящее время в спутниковой навигации начался переход к новому классу модулирующих функций,
получивших название BOC (Binary Offset Carrier)-сигналов.
Принципиальное отличие BOC-сигналов от сигналов с ФМ-2 состоит в том, что символ модулирующей ПСП BOC-сигнала представляет собой
не прямоугольный видеоимпульс, а отрезок меандрового колебания, включающий в себя некоторое постоянное число периодов k. Поэтому
сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Поэтому
сигналы с BOC-модуляцией часто называют меандровыми шумоподобными сигналами.
Использование сигналов с BOC-модуляцией повышает потенциальную точность измерения и разрешающую способность по задержке. Одновременно с этим, уменьшается уровень взаимных помех при совместном функционировании навигационных систем, использующих традиционные и новые сигналы.
Каждый спутник принимает с наземных станций управления навигационную информацию, которая передается обратно пользователям в составе навигационного сообщения. Навигационное сообщение содержит разные типы информации, необходимые для того, чтобы определить местоположение пользователя и синхронизовать его шкалу времени с национальным эталоном.
Типы информации навигационного сообщения
- Эфемеридная информация, необходимая для вычисления координат спутника с достаточной точностью
- Погрешность расхождения бортовой шкалы времени относительно системной шкалы времени для учета смещения времени космического аппарата при навигационных измерениях
- Расхождение между шкалой времени навигационной системы и национальной шкалой времени, для решения задачи синхронизации потребителей
- Признаки пригодности с информацией о состоянии спутника для оперативного исключения спутников с выявленными отказами из навигационного решения
- Альманах с информацией об орбитах и состоянии всех аппаратов в группировке для долгосрочного грубого прогноза движения спутников и планирования измерений
- Параметры модели ионосферы, необходимые одночастотным приемникам для компенсации погрешностей навигационных измерений, связанных с задержкой распространения сигналов в ионосфере
- Параметры вращения Земли для точного пересчета координат потребителя в разных системах координат
Признаки пригодности обновляются в течение нескольких секунд при обнаружении отказа. Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
Параметры эфемерид и времени, как правило, обновляются не чаще, чем раз в полчаса. При этом период обновления для разных систем сильно отличается и может достигать четырех часов, в то время как альманах обновляется не чаще, чем раз в день.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию и передается в виде потока цифровой информации (ЦИ).
Изначально во всех навигационных спутниковых системах использовалась структура вида «суперкадр/кадр/строка/слово». При этой структуре поток ЦИ формируется в виде непрерывно повторяющихся суперкадров,
суперкадр состоит из нескольких кадров, кадр состоит из нескольких строк.
В соответствии со структурой «суперкадр/кадр/строка/слово» формировались сигналы системы БЕЙДОУ, ГАЛИЛЕО (кроме E6), GPS (LNAV данные, L1), сигналы ГЛОНАСС с частотным разделением.
В зависимости от системы, размеры суперкадров, кадров и строк могут отличаться, но принцип формирования остается похожим.
Сейчас в большинстве сигналов используется гибкая строковая структура.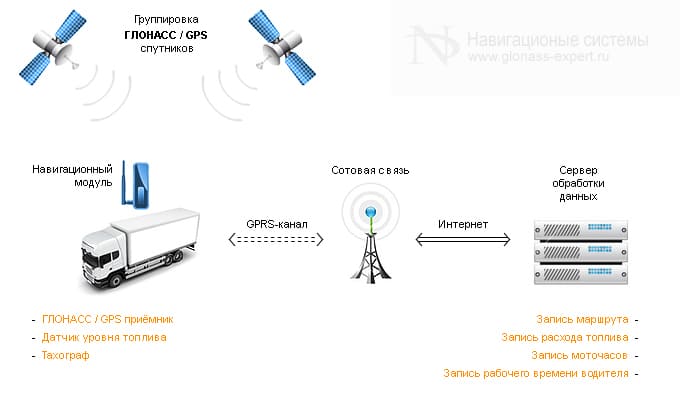 В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов.
Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
В этой структуре навигационное сообщение формируется в виде переменного потока строк различных типов.
Каждый тип строки имеет свою уникальную структуру и содержит определённый тип информации (указаны выше). НАП выделяет из потока очередную строку, определяет её тип и в соответствии с типом выделяет информацию, содержащуюся в этой строке.
Гибкая строковая структура навигационного сообщения позволяет значительно более эффективно использовать пропускную способность канала передачи данных.
Но главным достоинством навигационного сообщения с гибкой строковой структурой является возможность её эволюционной
модернизации при соблюдении принципа обратной совместимости. Для этого в ИКД для разработчиков НАП специально указывается,
что если НАП в навигационном сообщении встречает строки неизвестных ей типов, то она должна их игнорировать. Это позволяет добавлять
в процессе модернизации ГНСС к ранее существовавшим типам строк строки с новыми типами. НАП, выпущенная ранее, игнорирует строки с новыми типами и,
следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
НАП, выпущенная ранее, игнорирует строки с новыми типами и,
следовательно, не использует те новации, которые вводятся в процессе модернизации ГНСС, но при этом её работоспособность не нарушается.
Сообщения сигналов ГЛОНАСС с кодовым разделением имеют строковую структуру.
На точность определения потребителем своих координат, скорости движения и времени влияет множество факторов, которые можно разделить на категории:
- Системные погрешности, вносимые аппаратурой космического комплекса
Погрешности, связанные с функционированием бортовой аппаратуры спутника и наземного комплекса управления ГНСС обусловлены в основном несовершенством частотно-временного и эфемеридного обеспечения.
- Погрешности, возникающие на трассе распространения сигнала от космического аппарата до потребителя
Погрешности обусловлены отличием скорости распространения радиосигналов в атмосфере Земли от скорости их распространения в вакууме, а также зависимостью скорости от физических свойств различных слоёв атмосферы.
- Погрешности, возникающие в аппаратуре потребителя
Аппаратурные погрешности подразделяются на систематическую погрешность аппаратурной задержки радиосигнала в АП и флуктуационные погрешности, обусловленные шумами и динамикой потребителя.

Кроме того, на точность навигационно-временного определения существенно влияет взаимное расположение навигационных спутников и
потребителя.
Количественной характеристикой погрешности определения местоположения и поправки показаний часов, связанной с особенностями пространственного положения спутника и потребителя, служит так
называемый геометрический фактор ΓΣ или коэффициент геометрии. В англоязычной литературе используется обозначение GDOP — Geometrical delusion of precision.
Геометрический фактор ΓΣ показывает, во сколько раз происходит уменьшение точности измерений и зависит от следующих параметров:
- Гп — геометрический фактор точности определения местоположения потребителя ГНСС в пространстве.
Соответствует PDOP — Position delusion of precision. - Гг — геометрический фактор точности определения местоположения потребителя ГНСС по горизонтали.
Соответствует HDOP — Horizontal delusion of precision. - Гв — геометрический фактор точности определения местоположения потребителя ГНСС по вертикали.
Соответствует VDOP — Vertical delusion of precision. - Гт — геометрический фактор точности определения поправки показаний часов потребителя ГНСС.
Соответствует TDOP — Time delusion of precision.
Существующие в настоящее время глобальные навигационные спутниковые системы (ГНСС) GPS и ГЛОНАСС позволяют удовлетворить потребности в навигационном обслуживании обширный круг потребителей. Но существует ряд задач, которые требуют высоких точностей навигации. К этим задачам относятся: взлет, заход на посадку и посадка самолетов, судовождение в прибрежных водах, навигация вертолетов и автомобилей и другие.
Классическим методом повышения точности навигационных определений является использование дифференциального (относительного) режима определений.
Дифференциальный режим предполагает использование одного или более базовых приёмников, размещённых в точках с известными координатами, которые одновременно с приёмником потребителя (подвижным, или мобильным) осуществляют приём сигналов одних и тех же спутников.
Повышение точности навигационных определений достигается за счёт того, что ошибки измерения навигационных параметров потребительского и базовых приёмников являются коррелированными. При формировании разностей измеряемых параметров большая часть таких погрешностей компенсируется.
В основе дифференциального метода лежит знание координат опорной точки – контрольно-корректирующей станции (ККС) или системы опорных станций, относительно которых могут быть вычислены поправки к определению псевдодальностей до навигационных спутников. Если эти поправки учесть в аппаратуре потребителя, то точность расчета, в частности, координат может быть повышена в десятки раз.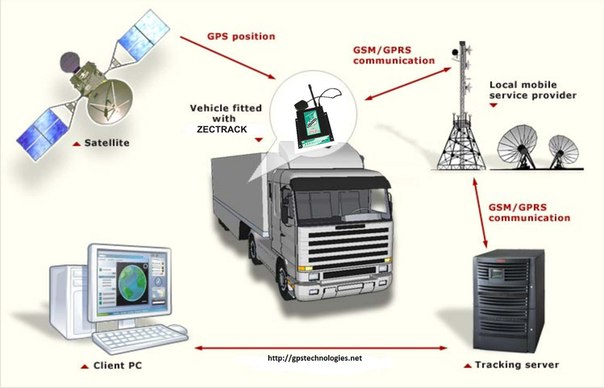
Для обеспечения дифференциального режима для большого региона – например, для России, стран Европы, США — передача корректирующих дифференциальных поправок осуществляется при помощи геостационарных спутников. Системы, реализующие такой подход, получили название широкозонные дифференциальные системы.
Подробнее о системах функциональных дополнений ГНСС, которые предоставляют потребителям дополнительную корректирующую информацию, смотрите в разделе «Функциональные дополнения».
НаверхСистема ГЛОНАСС: назначение и основные особенности
Система ГЛОНАСС — инструмент спутниковой навигации, применяемый в глобальных масштабах. Ее создание началась по заказу военных ведомств в 1976 году. Единственным аналогом в данное время является американская система GPS.
Другие аналогичные разработки (например, китайская «Бэйдоу») имеют лишь региональное применение.
Задача системы ГЛОНАСС — определение местонахождения объекта (это может быть транспортное средство, человек, животное, контейнер с грузом и т. п.) путем вычисления его координат с помощью специального устройства — трекера, находящегося в постоянном контакте со спутниками. Изначально использование системы предполагалось только в военно-оборонной сфере, однако в настоящее время область ее применения заметно расширена, и она повсеместно эксплуатируется в научных, исследовательских, поисковых и прочих гражданских целях.
п.) путем вычисления его координат с помощью специального устройства — трекера, находящегося в постоянном контакте со спутниками. Изначально использование системы предполагалось только в военно-оборонной сфере, однако в настоящее время область ее применения заметно расширена, и она повсеместно эксплуатируется в научных, исследовательских, поисковых и прочих гражданских целях.
Всего для функционирования ГЛОНАСС используется 24 спутника, орбиты которых расположены на высоте 19 400 км. Для максимально точного позиционирования трекер должен получать сигнал как минимум с 4 из них. Доступ к ГЛОНАСС-сигналам предоставляется всем видам российских и иностранных пользователей без всяких ограничений и полностью бесплатно.
История развития
Разработки системы ГЛОНАСС начались в 60-х годах прошлого столетия, официальное начало деятельности положено в конце 1976 года принятием соответствующего правительственного постановления, а первый спутник вышел на орбиту в 1982 году.
Через десять лет в составе системы функционировало 12 спутников, а к 1995 году их количество достигло заданной величины — 24. Однако по ряду объективных причин (в том числе из-за недостаточного финансирования) число функционирующих орбитальных аппаратов к 2001 году сократилось до 6.
После этого руководство страны приняло меры по восстановлению работоспособности ГЛОНАСС, и к 2010 году орбитальная группировка системы насчитывала 26 спутников. В настоящее время их число доведено до 28, из которых 24 работают в штатном режиме, по одному находится в резерве и на исследованиях, а еще два — на испытаниях.
Развитием и поддержкой системы ГЛОНАСС занимается Роскосмос совместно с ОАО «Российская корпорация ракетно-космического приборостроения и информационных систем».
Оборудование ГЛОНАСС
Перемещение объектов в пространстве и времени отслеживается с помощью компактных устройств — ГЛОНАСС-трекеров. В зависимости от конструкции и назначения, такие приборы крепятся в автомобиле либо ином транспортном средстве, на теле человека (запястье, ноге и пр.) или животного, в контейнере с грузом и т. д.
В зависимости от конструкции и назначения, такие приборы крепятся в автомобиле либо ином транспортном средстве, на теле человека (запястье, ноге и пр.) или животного, в контейнере с грузом и т. д.
Данные с трекеров поступают на сервер системы, доступ к ним осуществляется после авторизации пользователя с компьютера, мобильных устройств, в том числе через веб-интерфейс. На сегодняшний день трекер выполняет не только функции определения геопозиции объекта, но и при помощи подключаемых к приборов
Преимущества сотрудничества с компанией «ЕвроМобайл»
- Прямые контакты с производителями ГЛОНАСС-оборудования.
- Собственный сервисный центр, предоставляющий все виды текущего ремонтного и консультационного обслуживания.
- Постоянная техподдержка.
- Развитая логистическая инфраструктура (клиент получает ГЛОНАСС-оборудование без задержек).
Как работает GPS | Keddr.com
Мы каждый день пользуемся системами навигации. Кому-то нужно проложить маршрут в незнакомое место, кто-то ищет новые пути дом-работа-дом, кто-то просто страдает топографическим кретинизмом. Мы редко задумываемся о том, как это работает и вспоминаем, что это как-то связано со спутниками только тогда, когда все рьяно тупит и маршрут не строится. А все же, как это работает и нужен ли для корректной работы GPS Интернет?
Кому-то нужно проложить маршрут в незнакомое место, кто-то ищет новые пути дом-работа-дом, кто-то просто страдает топографическим кретинизмом. Мы редко задумываемся о том, как это работает и вспоминаем, что это как-то связано со спутниками только тогда, когда все рьяно тупит и маршрут не строится. А все же, как это работает и нужен ли для корректной работы GPS Интернет?
Нет, Интернет не нужен. С этим разобрались. На самом деле, вокруг нашей планеты кружит 24 спутника (запущено почти 60, но не все уже в работе), с помощью которых каждый из нас может определить свое местоположение. У каждого спутника есть своя орбита, и за космические сутки (23 часа 56 минут) он успевает облететь Землю два раза. И все же, как люди додумались до создания спутниковой системы?
В 80-х российские учёные занялись разработкой системы навигации по спутникам, которую в будущем назовут «ГЛОНАСС». Первый спутник со стороны России был запущен в 1982 году, но идея не взлетела, потому что финансирование закончилось. Зато в это время подсуетились в США, заметив, что их соперник уже во всю выводит что-то на орбиту. Их проект начался еще в 1973 году, но шел неспешно, не торопясь, а после того, как «противник» вплотную занялся делом, американцы до 1993 года быстренько вывели на орбиту Земли 24 спутника и покрыли всю площадь планеты сигналом. Изначально, GPS задумывался исключительно как военная технология, но в процессе работы над проектом было решено дать возможность каждому использовать систему. Для этого абсолютная точность наведения была изменена с помощью специального алгоритма.
Зато в это время подсуетились в США, заметив, что их соперник уже во всю выводит что-то на орбиту. Их проект начался еще в 1973 году, но шел неспешно, не торопясь, а после того, как «противник» вплотную занялся делом, американцы до 1993 года быстренько вывели на орбиту Земли 24 спутника и покрыли всю площадь планеты сигналом. Изначально, GPS задумывался исключительно как военная технология, но в процессе работы над проектом было решено дать возможность каждому использовать систему. Для этого абсолютная точность наведения была изменена с помощью специального алгоритма.
Принцип работы
24 спутника на высоте около 20 тысяч километров, вокруг планеты они расположены так, что в любой момент времени из любой точки Земли точно видно 4 спутника, максимум их может быть видно 12. В каждом спутнике имеются атомные часы, точность которых определена до наносекунд. Любой объект на Земле или над ней (самолеты, к примеру) определяют свое положение в зависимости от получаемых сигналов времени от разных спутников. Расстояние от трех спутников определяет точку на земном шаре. Для корректного определения вашего местоположения необходимы как минимум 3 спутника, но чем их больше, тем точность выше. Три сигнала дают нам три точки, вокруг которых мы можем начертить воображаемую сферу с радиусом, равным расстоянию до объекта. Пересечение двух сфер дает окружность возможных положений искомого объекта, а наличие третьей сферы дает возможность свести данные до одной конкретной точки — вашего местоположения. В целом каждое устройство с GPS-приемником ориентируется на данные от 3 до 12 спутников. Когда пользователь задает запрос (в машине, в смартфоне, просто gps-навигатор), он получает «ответочку» от трех-четырех и больше спутников с орбиты. Сигнал содержит данные о координатах спутника и времени на его часах. Получая сигналы из разных источников, учитывая разницу времени на Земле и в космосе, зная скорость передачи радиоволн, приемник рассчитывает с помощью уравнения расстояние до спутника (называется она псевдодальность) и, анализируя данные, определяет точное местоположение.
Расстояние от трех спутников определяет точку на земном шаре. Для корректного определения вашего местоположения необходимы как минимум 3 спутника, но чем их больше, тем точность выше. Три сигнала дают нам три точки, вокруг которых мы можем начертить воображаемую сферу с радиусом, равным расстоянию до объекта. Пересечение двух сфер дает окружность возможных положений искомого объекта, а наличие третьей сферы дает возможность свести данные до одной конкретной точки — вашего местоположения. В целом каждое устройство с GPS-приемником ориентируется на данные от 3 до 12 спутников. Когда пользователь задает запрос (в машине, в смартфоне, просто gps-навигатор), он получает «ответочку» от трех-четырех и больше спутников с орбиты. Сигнал содержит данные о координатах спутника и времени на его часах. Получая сигналы из разных источников, учитывая разницу времени на Земле и в космосе, зная скорость передачи радиоволн, приемник рассчитывает с помощью уравнения расстояние до спутника (называется она псевдодальность) и, анализируя данные, определяет точное местоположение. Таким образом каждый человек может прокладывать маршруты и находить себя в пространстве в режиме реального времени.
Таким образом каждый человек может прокладывать маршруты и находить себя в пространстве в режиме реального времени.
Интересным моментом в работе GPS является вопрос коррекции времени. Ведь точность в вопросах определения геолокации важна, особенно если речь идет о военной технологии, пусть она и стала общественным достоянием. Для корректной работы спутников была учтена теория относительности. Из-за того, что с Земли мы видим спутники в движении, специальная теория относительности утверждает, что часы на них должны идти медленнее на 7 микросекунд из-за меньшей скорости хода времени. Кроме того, положение спутника относительно Земли заставило ученых брать в расчет кривизну пространства и времени, ведь масса планеты меньше влияет на часы на спутнике, чем на ее территории (ход часов, расположенных ближе к массивному объекту, кажется медленнее, чем часов, находящихся дальше от объекта). Короче говоря, с Земли кажется, что время на спутнике идет медленнее с разницой в 38 миллисекунд в сутки. Ведь даже разность данных на 20 наносекунд привела бы к погрешностям в вычислениям геолокации каждые пару минут, и эта ошибка накапливалась бы. К примеру, за день точность определения местоположения объектов сбилась бы приблизительно на 10 км!
Ведь даже разность данных на 20 наносекунд привела бы к погрешностям в вычислениям геолокации каждые пару минут, и эта ошибка накапливалась бы. К примеру, за день точность определения местоположения объектов сбилась бы приблизительно на 10 км!
Конечно, погрешности имеются. Каждый знает, что сигнал очень плохо считывается в помещении, ведь он плохо проходит через бетонные стены и металлические укрепления, в тоннеле или подвале не принимается совсем. Даже повышенная облачность может сбить точность информации. К тому же, если часы вашего GPS идут неверно, это тоже может привести к неправильным результатам.
система ГЛОНАСС для контроля транспорта что это такое
Владельцы любого бизнеса, в котором используются транспортные средства, хотели бы экономить на расходах, связанных с этим транспортом. Но не все знают, как это можно сделать. Есть простое средство – система ГЛОНАСС для контроля транспорта. О ней и пойдет речь в этой статье.
Содержание
- Всё о спутниковых группировках
- Отчеты в системе контроля транспорта
- Качество сигнала — нюансы и особенности
- Мониторинг топлива – варианты подробно
- Дополнительные датчики
- Передача данных по каналу сотовой связи
- Выбор системы контроля транспорта
Что же такое система ГЛОНАСС для контроля транспорта, простыми словами?
Всё о спутниковых группировках
На орбите нашей планеты находится разветвленная сеть, состоящая из 56 спутников. Это 24 спутника, которые принадлежит Российской Федерации, и они входят в систему ГЛОНАСС. А оставшиеся 32 составляют систему GPS и принадлежат США. Система мониторинга транспорта использует все указанные выше спутники в своей работе. С помощью них отслеживается передвижение любого транспортного средства (на котором установлен специальный трекер) в любой точке мира. Данные о местонахождении считываются спутником с трекера и передаются, посредством вмонтированной в этом трекере сим-карты на ПК, или мобильное устройство с предустановленным ранее соответствующим программным обеспечением. Интерфейс, которого и позволяет нам, не только наблюдать за передвижением данного транспортного средства (здесь и далее в статье – ТС) в онлайн режиме, но и получать массу другой полезной информации.
Интерфейс, которого и позволяет нам, не только наблюдать за передвижением данного транспортного средства (здесь и далее в статье – ТС) в онлайн режиме, но и получать массу другой полезной информации.
Какую полезную информацию мы можем почерпнуть из приложения к системе ГЛОНАСС для контроля транспорта?
Отчеты в системе контроля транспорта
Ниже приведен список популярных отчетов:
- пробег и расход топлива транспортных средств
- перемещения транспортных средств
- расхода топлива по времени
- расхода топлива по пробегу
- скоростной режим транспортных средств
- заезд транспортных средств на объекты
- движения транспортных средств по маршруту
Здесь, разумеется, перечислены самые основные функции. Их спектр намного шире, и вы сами можете убедиться в этом воспользовавшись демо версией нашего приложения, а также наглядными примерами основных, самых популярных у пользователей, отчетов.
Какие еще подводные камни могут ожидать вас при подключении к системе ГЛОНАСС для контроля транспорта?
Есть ряд моментов, о которых вам стоит знать, что бы понимать базовые принципы функционирования данной системы:
Качество сигнала — нюансы и особенности
Местонахождение ТС определяется с помощью спутников, которые (к нашей общей радости)), пока не могут видеть сквозь стены и другие естественные препятствия. Поэтому сигнал может теряться, если ваше авто находится в тоннеле, подземной стоянке, ангаре и так далее. Но не стоит переживать по этому поводу. Данная неприятность нивелирована в нашем приложении таким образом: данные о передвижении в таких скрытых локациях всё равно записываются на носитель, встроенный в трекер, а потом передаются на спутник, когда появляется возможность. В итоге, всю информацию вы получаете в полном объеме, просто не онлайн, а после появления ТС в зоне доступа ближайшего спутника.
Мониторинг топлива – варианты подробно
Важный момент в системе контроля транспорта, это мониторинг расхода топлива в наблюдаемом ТС. И тут тоже есть свои особенности.
И тут тоже есть свои особенности.
На сегодняшний день, есть два основных способа контроля расхода топлива в автомобиле: Датчик уровня топлива, Контроллер CAN-шины. Разберем подробнее оба этих способа.
Датчик уровня топлива – устройство представляющие собой длинный щуп и передающие устройство. Датчик монтируется непосредственно в топливный бак ТС, для чего в баке делается отверстие. Для того, чтобы данные, передаваемые датчиком, были корректны, предварительно осуществляется процедура тарировки бака (сливается и заливается топливо параллельно производятся необходимые настройки устройства). Данные с датчика передаются на мобильный терминал, он же GPS трекер, после чего вы можете наблюдать их в приложении. Важный момент, на который стоит обратить внимание, заключается в том, что ДУТ (датчик уровня топлива) монтируется только в авто, использующие дизельное топливо. В ТС, которые работают на бензине, данные устройства ставить опасно из-за высокой горючести такого топлива.
Контроллер CAN-шины — это принципиально иной способ контроля топлива, основанный на передачи данных посредством бортового компьютера автомобиля.![]() Данные передаются через CAN шину на контроллер, а с него на предварительно установленный GPS трекер. Далее данные обрабатываются и передаются трекером, так же, как и в случае с ДУТ. Сам контроллер представляет собой миниатюрное устройство, размером со спичечный коробок, которое подключается к CAN разъему самим пользователем и не требует вмешательства специалиста. На первый взгляд может показаться, что данный вариант намного предпочтительней, чем предыдущий, но не всё так просто. Дело в том, что для его применения необходимо соблюдение ряда условий: наличие, собственно разъема CAN шины, а так же самой возможности снимать показания топлива через компьютер ТС (отсутствие, или наличие данной возможности, регулируется производителем авто в программном обеспечении борт компьютера).
Данные передаются через CAN шину на контроллер, а с него на предварительно установленный GPS трекер. Далее данные обрабатываются и передаются трекером, так же, как и в случае с ДУТ. Сам контроллер представляет собой миниатюрное устройство, размером со спичечный коробок, которое подключается к CAN разъему самим пользователем и не требует вмешательства специалиста. На первый взгляд может показаться, что данный вариант намного предпочтительней, чем предыдущий, но не всё так просто. Дело в том, что для его применения необходимо соблюдение ряда условий: наличие, собственно разъема CAN шины, а так же самой возможности снимать показания топлива через компьютер ТС (отсутствие, или наличие данной возможности, регулируется производителем авто в программном обеспечении борт компьютера).
Дополнительные датчики
Стоит заметить так же, что датчики топлива, это далеко не всё, что можно подключать дополнительно к системе ГЛОНАСС для контроля транспорта. Есть ряд возможностей, которые Вы можете реализовать, ограничиваясь только конструктивными особенностями вашего ТС и вашими потребностями.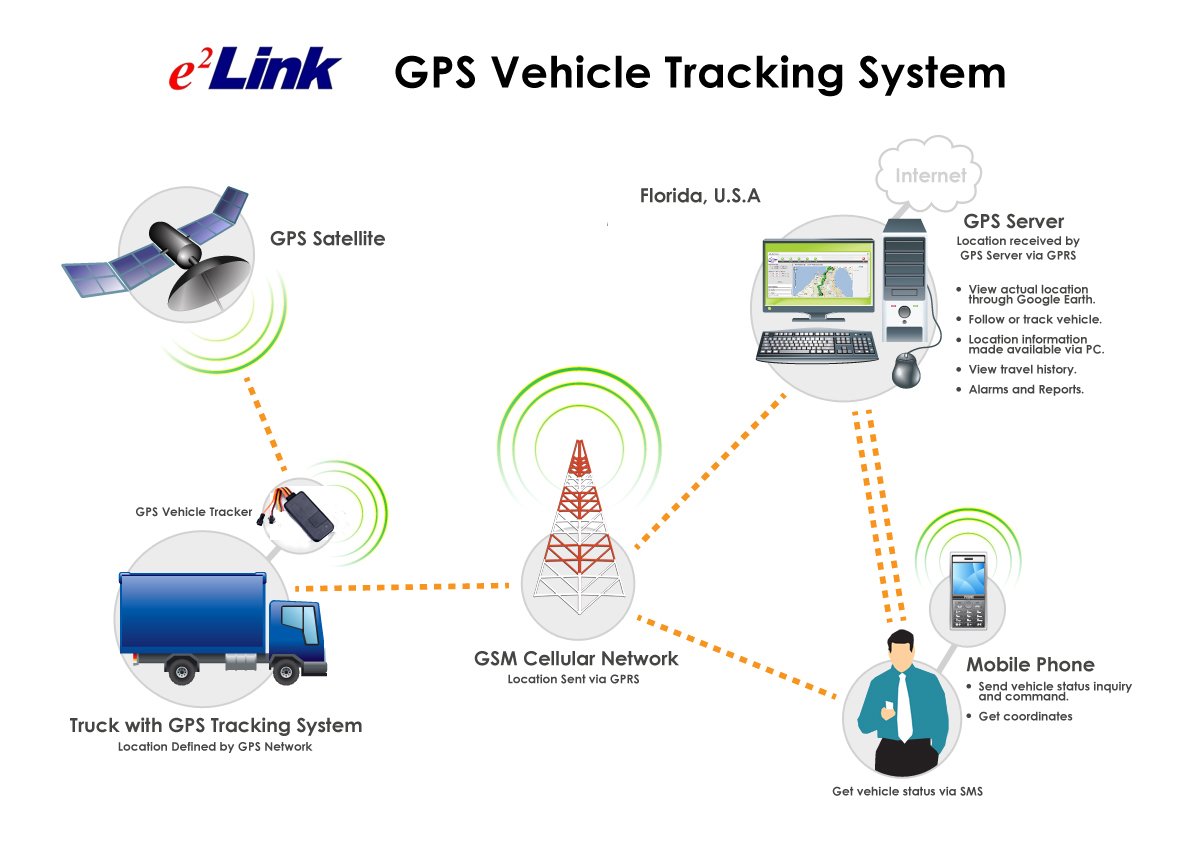 Подробнее можете узнать у нас на сайте в разделе «Собери свою комплектацию» .
Подробнее можете узнать у нас на сайте в разделе «Собери свою комплектацию» .
Передача данных по каналу сотовой связи
В нашей статье мы уже упоминали о передачи данных с трекера в приложение при помощи сим карты. Давайте остановимся на этом подробнее.
Мы уже знаем, что информацию о нахождении нашего ТС мы получаем посредством спутника, отслеживающего сигнал GPS трекера. Но в дальнейшем эти данные должны как-то попасть в приложение, установленное на вашем ПК, или в телефоне. Это происходит путем передачи обработанного сигнала сим-картой, или сим-чипом вмонтированным в ваш трекер, по каналу сотовой связи. Обслуживание сим-карт происходит через те же провайдеры мобильной связи, которые мы все ежедневно используем для общения по мобильным телефонам. Но в нашем случае, все контакты и расходы, связанные с сотовым оператором, ложатся на плечи компании, предоставившей вам услугу мониторинга транспорта.
Выбор системы контроля транспорта
Есть варианты более бюджетной, но менее качественной услуги по организации системы для контроля транспорта. В таких случаях, вы просто приобретаете оборудование (сам трекер), на котором будет пустой разъем под сим карту и всё. На этом обязательства организации, продавшей вам данный трекер заканчиваются. Далее вам самостоятельно будет необходимо найти и оформить специальный тариф и подключить нужную сим карту. Установка терминала так же ложится на ваши плечи. И если в процессе монтажа что-то пойдет не так, винить в этом вам придется только на себя. Все контакты с провайдером сотовой связи, так же придется осуществлять самостоятельно. Далее вам будет необходимо найти подходящее именно вашей модели трекера приложение, в котором он будет корректно отображаться и передавать нужные вам данные. А в случае сбоев в работе устройства, или приложения, вам будет очень не просто найти ответственного, а как следствие и способ решения возникшей неполадки. Так же подобные трекеры, это зачастую массовое китайское производство. О каком-то высоком качестве здесь говорить не приходится. Да и организация, у которой вы его купили, по сути, не является интегратором в сфере системы контроля транспорта.
В таких случаях, вы просто приобретаете оборудование (сам трекер), на котором будет пустой разъем под сим карту и всё. На этом обязательства организации, продавшей вам данный трекер заканчиваются. Далее вам самостоятельно будет необходимо найти и оформить специальный тариф и подключить нужную сим карту. Установка терминала так же ложится на ваши плечи. И если в процессе монтажа что-то пойдет не так, винить в этом вам придется только на себя. Все контакты с провайдером сотовой связи, так же придется осуществлять самостоятельно. Далее вам будет необходимо найти подходящее именно вашей модели трекера приложение, в котором он будет корректно отображаться и передавать нужные вам данные. А в случае сбоев в работе устройства, или приложения, вам будет очень не просто найти ответственного, а как следствие и способ решения возникшей неполадки. Так же подобные трекеры, это зачастую массовое китайское производство. О каком-то высоком качестве здесь говорить не приходится. Да и организация, у которой вы его купили, по сути, не является интегратором в сфере системы контроля транспорта.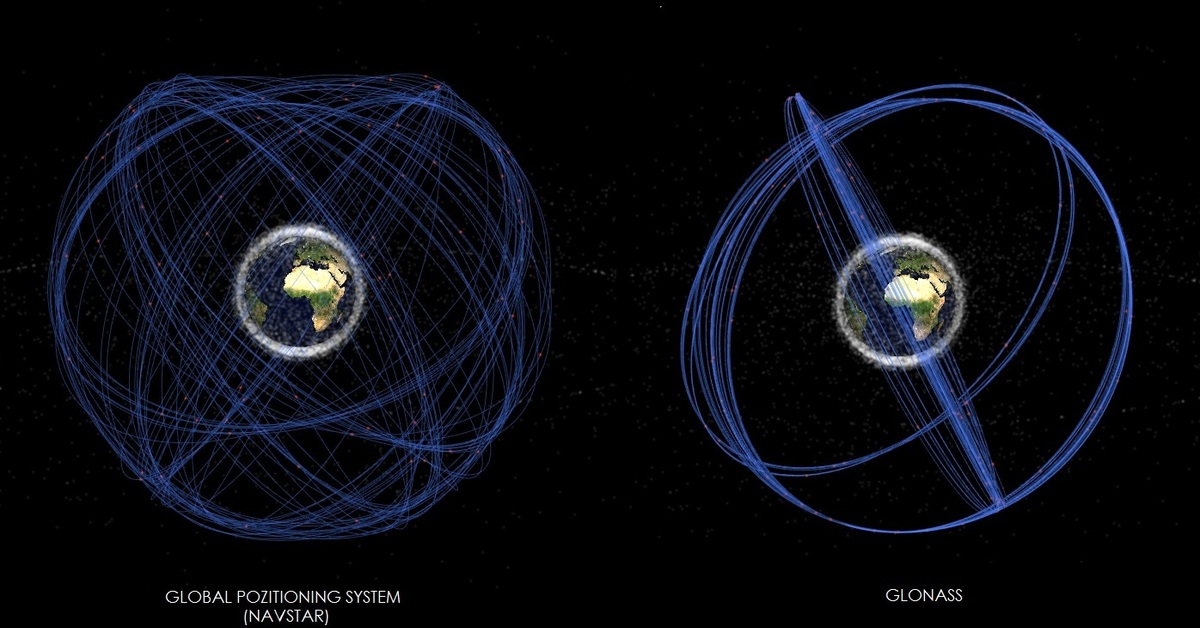 Они, как правило, просто перепродают данный товар, не предоставляя никаких связанных с ним услуг.
Они, как правило, просто перепродают данный товар, не предоставляя никаких связанных с ним услуг.
Какой из описанных выше вариантов выбрать, решать вам. Мы же постарались максимально информативно рассказать о том, с чем вам придется иметь дело при выборе системы мониторинга транспорта.
Надеемся в нашей статье мы сумели ответить на вопрос, поставленный в заголовке — система ГЛОНАСС для контроля транспорта что это такое. В завершении можно добавить, что данная система, является хорошим подспорьем любому предпринимателю, небольшому, или крупному бизнесу, так как позволяет лучше контролировать расходы на содержание своего автопарка и на оплату услуг водителей управляющих транспортными средствами составляющими этот парк. Возможно на первый взгляд, кому-то может показаться, что затраты, связанные с установкой и последующей абонентской платой системы мониторинга неоправданные. Но статистика, вещь неумолимая. А она говорит о том, что экономия денежных средств, с помощью системы ГЛОНАСС для контроля транспорта окупает все затраты на неё уже в первые месяцы, а иногда и ранее. В дальнейшем расходы на абонентскую плату не идут не в какое сравнение с теми суммами, которые вы и ваш бизнес могли потерять, тратя их на не целевое использование транспортных средств, или не целевой расход ГСМ.
В дальнейшем расходы на абонентскую плату не идут не в какое сравнение с теми суммами, которые вы и ваш бизнес могли потерять, тратя их на не целевое использование транспортных средств, или не целевой расход ГСМ.
Что лучше всего подходит для приложений слежения?
За последние несколько лет стало доступно множество наборов микросхем, которые могут отслеживать группировки спутников в дополнение к GPS. От клиентов часто задают вопрос: что лучше всего подходит для моего приложения, GPS или ГЛОНАСС? Быстрый ответ: «Используйте их оба». К сожалению, чем больше созвездий вы добавите, тем выше будет цена. В этой короткой статье я рассмотрю некоторые из основных различий между этими технологиями и опишу различные варианты, доступные дизайнеру.Мы надеемся, что это станет хорошей отправной точкой в поисках лучшего решения для отслеживания вашего приложения.
Краткий обзор спутниковых технологий Давайте сделаем шаг назад и посмотрим на технологию в целом. Группа спутников, передающих информацию о местоположении, называется созвездием. Спутники транслируют сигналы на Землю, и, вычисляя разницу во времени приема сигналов от разных спутников, приемник может определить, где он находится.Положение спутников известно и предоставляется в сигналах, которые они транслируют. Глобальная система позиционирования (GPS) — самая старая из таких группировок. Он был разработан военными США и начал действовать в 1995 году. Он называется Global, потому что вы можете принимать сигналы от этого созвездия в любой точке мира. Напротив, QZSS — это японская региональная система, охватывающая только Азию и Океанию. Для приложений слежения важно, чтобы ваш приемник мог «видеть» (или принимать сигналы) по крайней мере 4 спутника, чтобы иметь возможность вычислять широту, долготу и высоту.Если одна из этих переменных известна, требуется меньше спутников. Здесь важно понимать, что чем больше спутников ваш приемник может «видеть», тем меньше вероятность того, что он потеряет отслеживание.
Группа спутников, передающих информацию о местоположении, называется созвездием. Спутники транслируют сигналы на Землю, и, вычисляя разницу во времени приема сигналов от разных спутников, приемник может определить, где он находится.Положение спутников известно и предоставляется в сигналах, которые они транслируют. Глобальная система позиционирования (GPS) — самая старая из таких группировок. Он был разработан военными США и начал действовать в 1995 году. Он называется Global, потому что вы можете принимать сигналы от этого созвездия в любой точке мира. Напротив, QZSS — это японская региональная система, охватывающая только Азию и Океанию. Для приложений слежения важно, чтобы ваш приемник мог «видеть» (или принимать сигналы) по крайней мере 4 спутника, чтобы иметь возможность вычислять широту, долготу и высоту.Если одна из этих переменных известна, требуется меньше спутников. Здесь важно понимать, что чем больше спутников ваш приемник может «видеть», тем меньше вероятность того, что он потеряет отслеживание.
Теперь, когда у нас есть представление о том, как работает система и что нам нужно для отслеживания, давайте сравним GPS с российской системой ГЛОНАСС. Что касается GPS, США обязались поддерживать как минимум 24 работающих спутника GPS в 95% случаев.За последние несколько лет стабильно работал 31 спутник. Созвездие ГЛОНАСС также было завершено в 1995 году, но в конце 1990-х годов стало неполным из-за потери спутников. При Владимире Путине проект ГЛОНАСС стал приоритетным и получил существенное увеличение финансирования. К октябрю 2011 года была восстановлена полная группировка из 24 спутников, что обеспечило глобальный охват. С точки зрения точности позиционирования GPS в целом немного лучше, чем ГЛОНАСС, но из-за различного позиционирования спутников ГЛОНАСС ГЛОНАСС имеет лучшую точность в высоких широтах (далеко на севере или на юге).
Доступные модули GPS Итак, если ваш продукт всегда будет иметь беспрепятственный обзор неба или вы хотите самое дешевое решение, я бы порекомендовал GPS.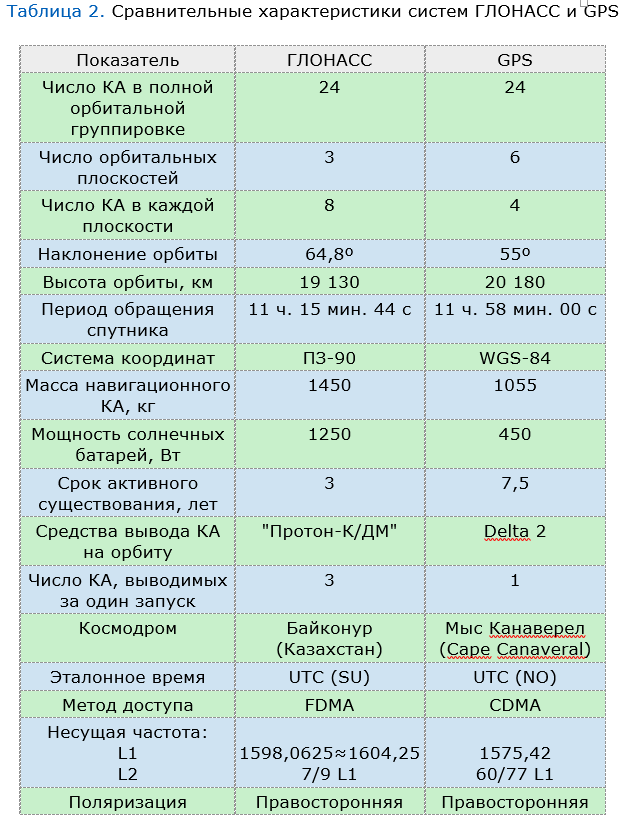 Telit предлагает множество модулей GPS с отличной производительностью. Их самый маленький модуль GPS, SE880, имеет размер всего 4,7 x 4,7 мм без антенны.
Telit предлагает множество модулей GPS с отличной производительностью. Их самый маленький модуль GPS, SE880, имеет размер всего 4,7 x 4,7 мм без антенны.
Модули Telit не поставляются со встроенной антенной, поэтому для клиентов, которые хотели бы иметь полное решение, мы предлагаем модули Antenova, такие как M10478-A1, который составляет 13.8 x 9,5 мм и включает бортовую антенну.
Доступные модули GPS + ГЛОНАСС Для приложений в городских условиях, где высокие здания могут закрывать часть неба, я всегда рекомендую решение, которое использует преимущества спутников GPS и ГЛОНАСС. Проезжая между высокими зданиями, вы понимаете, что это ограничивает количество спутников, которые будут видны приемнику. Если вы полагаетесь только на одно созвездие, то на таком маленьком участке неба может не быть видны 4 спутника, что затрудняет определение местоположения.Когда вы добавляете второе созвездие, вы удваиваете свои шансы получить исправление в этой среде.
Telit предлагает несколько модулей GPS + ГЛОНАСС, которые легко объединяют информацию от обоих созвездий. SE868-V2 — популярный выбор из-за его занимаемой площади 11 x 11 мм. Помимо GPS и ГЛОНАСС, он также готов работать с QZSS, Galileo (Европа) и Compass (ранее BeiDou, Китай), поэтому в вашем дизайне можно будет использовать эти созвездия в будущем.
Antenova также предлагает M10478-A3, который имеет такую же площадь основания 13,8 x 9,5 мм и охватывает как GPS, так и ГЛОНАСС, но включает в себя бортовую антенну.
Symmetry предлагает гораздо больше модулей позиционирования в дополнение к этим продуктам, а также оценочные комплекты, чтобы сократить время разработки. Мы также предлагаем антенны в дополнение к этим модулям и можем помочь выбрать правильный модуль и антенну для вашей конструкции. Чтобы получить помощь в выборе модулей и антенн, позвоните нам по телефону (310) 536-6190 или свяжитесь с нами через Интернет.
Автор: Cobus Heukelman
Новые преимущества комбинированных наблюдений GPS и ГЛОНАСС для мониторинга высокоширотных ионосферных неоднородностей: на примере июньской геомагнитной бури 2015 г.
 | Земля, планеты и космос
| Земля, планеты и космосСравнение измерений GPS и ГЛОНАСС в полярном регионе
На рисунке 3 представлены два примера измерений GPS и ГЛОНАСС для двух наземных станций PFRR (65.1 ° с. 147,4 ° з.д.) и MAC1 (54,5 ° ю.ш .; 158,9 ° в.д.), расположенных в полярных регионах северного и южного полушарий соответственно. На левых панелях показана геометрия распределения IPP наблюдений GPS (синие точки) и ГЛОНАСС (красные точки) над этими станциями (черная точка) за 24 часа 22 июня 2015 г. Хорошо видно, что наблюдения ГЛОНАСС могут покрывать более широкая область в соответствующем направлении к полюсу, чем зона покрытия GPS. Как мы объясняли выше, это связано с более высоким наклоном орбит спутника ГЛОНАСС (65 ° vs.55 ° GPS). Поэтому спутники ГЛОНАСС могут отслеживаться одним и тем же операционным приемником GNSS на гораздо более высоких широтах, чем спутники GPS. Средняя и правая панели рис. 3 показывают значения ROT и ROTI, рассчитанные отдельно от измерений GPS и ГЛОНАСС. Левая ось этих графиков показывает PRN (псевдослучайный шум) — номер спутника. Отметим усиление активности ионосферных неоднородностей, начавшееся в ~ 07 UT на обеих полярных станциях GNSS. Эти повышения хорошо коррелируют с тремя периодами повышенного индекса АЕ: 06–11, 15–17 и 18–21 UT 22 июня 2015 г. (см. Рис.1г). Следует отметить важную особенность: поведение значений ROT / ROTI и их амплитуды очень похожи между измерениями GPS и ГЛОНАСС. Другими словами, они действуют одинаково. Поэтому вклад данных ГЛОНАСС с разной геометрией и пространственным расположением может существенно дополнить наблюдения GPS. Таким образом, измерения флуктуаций (ROT / ROTI) от GPS и ГЛОНАСС совместимы и согласованы друг с другом и могут быть объединены в составной результат, такой как карта ROTI.
Отметим усиление активности ионосферных неоднородностей, начавшееся в ~ 07 UT на обеих полярных станциях GNSS. Эти повышения хорошо коррелируют с тремя периодами повышенного индекса АЕ: 06–11, 15–17 и 18–21 UT 22 июня 2015 г. (см. Рис.1г). Следует отметить важную особенность: поведение значений ROT / ROTI и их амплитуды очень похожи между измерениями GPS и ГЛОНАСС. Другими словами, они действуют одинаково. Поэтому вклад данных ГЛОНАСС с разной геометрией и пространственным расположением может существенно дополнить наблюдения GPS. Таким образом, измерения флуктуаций (ROT / ROTI) от GPS и ГЛОНАСС совместимы и согласованы друг с другом и могут быть объединены в составной результат, такой как карта ROTI.
Примеры измерений GPS и ГЛОНАСС для двух наземных станций PFRR (65,1 ° N; 147,4 ° W) и MAC1 (54,5 ° S; 158,9 ° E) в тревожный день 22 июня 2015 г .: распределение проекций IPP по одной станции ( левая панель, ) с черной точкой , указывающей местоположение станции; производная вариация ROT ( средняя панель, ) и вариация ROTI ( правая панель ) вдоль всех видимых спутников. Измерения GPS показаны синим цветом, измерения ГЛОНАСС — красным , а левая ось показывает номер спутника (PRN)
Измерения GPS показаны синим цветом, измерения ГЛОНАСС — красным , а левая ось показывает номер спутника (PRN)
Двухмерные комбинированные карты GPS и ГЛОНАСС ROTI
На рисунках 4 и 5 показаны почасовые карты ROTI, построенные в полярной географической проекции над северным и южным полушариями соответственно для спокойного дня 20 июня 2015 г. и двух неспокойных дней июня. 22 и 23, 2015.На основе объединенных наблюдений GPS и ГЛОНАСС эти карты ROTI были построены с высоким пространственным разрешением (1 ° × 1 ° по географической широте и долготе) и временным интервалом 1 час. Карта для 00 UT означает, что здесь мы усредняли данные с 00:00 до 00:59 UT. Полный набор почасовых карт ROTI доступен во вспомогательной информации (Дополнительный файл 1: S1, Дополнительный файл 2: S2, Дополнительный файл 3: S3).
Рис. 4 Двумерные карты ROTI, полученные на основе объединенных наблюдений GPS и ГЛОНАСС над северным полушарием для спокойного дня a 20 июня и тревожных дней b 22 июня и c 23 июня , 2015. Каждая вертикальная строка показывает карты ROTI, построенные с разрешением 1 час и показанные здесь с интервалом 4 часа. Черная точка показывает расположение геомагнитного полюса
Каждая вертикальная строка показывает карты ROTI, построенные с разрешением 1 час и показанные здесь с интервалом 4 часа. Черная точка показывает расположение геомагнитного полюса
Двумерные карты ROTI, полученные из объединенных наблюдений GPS и ГЛОНАСС над южным полушарием для , спокойного дня 20 июня и возмущенных дней b, 22 июня и c 23 июня 2015 г. Каждая вертикальная строка показывает карты ROTI, построенные с разрешением 1 час и показанные здесь с интервалом 4 часа. Черная точка показывает расположение геомагнитного полюса. Полный набор двумерных карт по обоим полушариям с интервалом времени 1 час доступен во вспомогательных материалах в виде Дополнительного файла 1: S1, Дополнительного файла 2: S2, Дополнительного файла 3: S3 соответственно до 20 июня, 22 июня и июня. 23 года 2015
Следует отметить, что североамериканский и европейский секторы имеют существенно лучший охват данными, чем другие регионы северного и южного полушария (см. рис.2а, д), поэтому почасовые карты ROTI показывают лучший охват данными и более высокое разрешение по этим регионам. В целом, средние и высокие широты северного полушария демонстрируют надлежащее покрытие наблюдениями GPS и ГЛОНАСС в широком диапазоне долгот 140 ° W – 50 ° E. Помимо GNSS, нет другого радиооборудования, способного обеспечить такое покрытие данными с земли.
рис.2а, д), поэтому почасовые карты ROTI показывают лучший охват данными и более высокое разрешение по этим регионам. В целом, средние и высокие широты северного полушария демонстрируют надлежащее покрытие наблюдениями GPS и ГЛОНАСС в широком диапазоне долгот 140 ° W – 50 ° E. Помимо GNSS, нет другого радиооборудования, способного обеспечить такое покрытие данными с земли.
Эти ежечасные карты ROTI демонстрируют динамику ионосферных неоднородностей в географической системе координат.Значения ROTI, отмеченные темно-синим цветом (ROTI ниже 0,2 TECU / мин), представляют очень слабые или отсутствие ионосферных неоднородностей. Значения ROTI, отмеченные оранжевым и красным цветом (ROTI> 0.8–1.0 TECU / min), соответствуют возникновению интенсивных ионосферных неоднородностей в этом секторе. Анализ карт ROTI для спокойного дня 20 июня 2015 г. (рис. 4а, 5а) выявил очень спокойную ситуацию над полярными областями в обоих полушариях с довольно слабыми неоднородностями, возникающими в окрестности геомагнитных полюсов.
Первые заметные изменения в характере распределения неоднородностей появились после 07–08 UT 22 июня 2015 г., вызванные вторым приходом CME и первым усилением авроральной активности (см. Рис. 1). Наиболее интенсивные неоднородности в обоих полушариях наблюдались после 16 UT 22 июня. Было обнаружено, что очень высокие значения ROTI (> 0,8–1 TECU / мин) образуют овальную структуру вокруг северного геомагнитного полюса. Далее, полученный с помощью GNSS овал неоднородности расширялся к экватору в течение нескольких часов, и его экваториальный край был обнаружен в североамериканском секторе на географической широте ~ 45 ° N – 50 ° N в течение более 2–3 часов.Наибольшие значения интенсивности ROTI в этом овальном элементе наблюдались в основном над Северной Европой. Следует также подчеркнуть, что интенсивные ионосферные неоднородности наблюдались над Южной Европой на географической широте от ~ 25 ° N до 40 ° N во время главной фазы шторма в 20-04 UT (рис. 4; дополнительный файл 2: S2, дополнительный файл 3: S3). Эти неоднородности были связаны с появлением вырывов плазмы и экваториальных плазменных пузырей в постзакатном секторе (20-04 UT) над низкими широтами Западной Африки после быстрого проникновения электрических полей в 18-20 UT 22 июня 2015 г. (для подробнее см. Черняк, Захаренкова, 2016б).
Эти неоднородности были связаны с появлением вырывов плазмы и экваториальных плазменных пузырей в постзакатном секторе (20-04 UT) над низкими широтами Западной Африки после быстрого проникновения электрических полей в 18-20 UT 22 июня 2015 г. (для подробнее см. Черняк, Захаренкова, 2016б).
Ионосферные неоднородности, возникшие во время геомагнитной бури в июне 2015 года и обнаруженные в результате комбинированных наблюдений GPS и ГЛОНАСС, влияют на характеристики навигационной системы. Отчет об анализе характеристик системы WAAS показал, что в период с 22 по 23 июня наблюдалось снижение характеристик курсового радиомаяка с вертикальным наведением (LPV) и характеристик курсового радиомаяка с вертикальным наведением до высоты принятия решения 200 футов (LPV200), обеспечиваемой WAAS в континентальной части США. (КОНУС), Аляска и Канада (Ваннер, 2015).В этих областях наблюдались сильные ионосферные неоднородности, связанные с высыпаниями авроральных частиц, более подробно описанные в следующих подразделах. Более того, очень интенсивные нарушения приводят к снижению производительности Европейской геостационарной навигационной службы (EGNOS). Очень интересно отметить, что влияние возникновения ионосферных неоднородностей на характеристики GNSS в европейском секторе наблюдалось не только в высоких широтах (неоднородности, связанные с выпадением частиц и образованием ионосферных пятен), но также и в Южной Европе и в Средиземноморском регионе. (неоднородности, связанные с бурными плазменными истощениями экваториального происхождения, т.д., развитие плазменных пузырей) (Черняк, Захаренкова, 2016б).
Более того, очень интенсивные нарушения приводят к снижению производительности Европейской геостационарной навигационной службы (EGNOS). Очень интересно отметить, что влияние возникновения ионосферных неоднородностей на характеристики GNSS в европейском секторе наблюдалось не только в высоких широтах (неоднородности, связанные с выпадением частиц и образованием ионосферных пятен), но также и в Южной Европе и в Средиземноморском регионе. (неоднородности, связанные с бурными плазменными истощениями экваториального происхождения, т.д., развитие плазменных пузырей) (Черняк, Захаренкова, 2016б).
На высоких широтах образование и эволюция ионосферных неоднородностей были связаны с высыпанием авроральных частиц после прихода КВМ и дальнейшим развитием главной фазы этой геомагнитной бури.
На рисунке 5 представлена эволюция ионосферных неоднородностей над южным полушарием. Здесь также можно оценить различия в возникновении, интенсивности и местоположении ионосферных неоднородностей.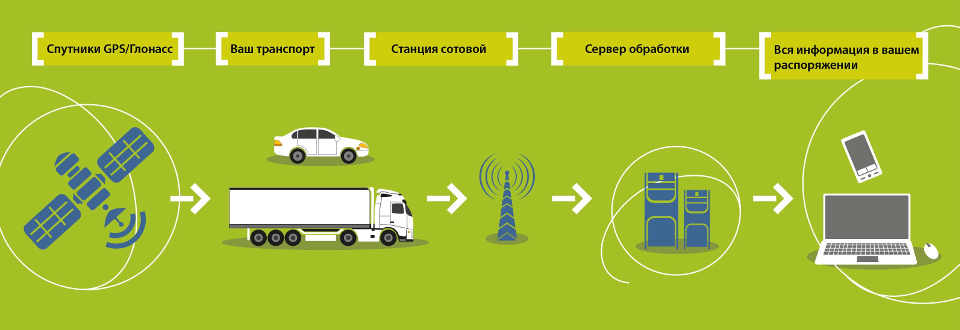 Мы отмечаем появление высоких значений ROTI вблизи геомагнитного полюса, которые могут быть связаны с ионосферными неоднородностями, вызванными высыпанием частиц на дневной куспид (например, Kelley et al. 1982; Weber et al. 1984). Ионосферные неоднородности такого происхождения обычно развиваются даже в спокойных геомагнитных условиях (см. Рис. 5а).
Мы отмечаем появление высоких значений ROTI вблизи геомагнитного полюса, которые могут быть связаны с ионосферными неоднородностями, вызванными высыпанием частиц на дневной куспид (например, Kelley et al. 1982; Weber et al. 1984). Ионосферные неоднородности такого происхождения обычно развиваются даже в спокойных геомагнитных условиях (см. Рис. 5а).
Видно выраженное усиление и расширение зоны неоднородности к экватору. Следует отметить, что из-за существенно худшего покрытия данными GNSS над южным полушарием (из-за преобладания площади океана) такие эффекты наблюдались в ограниченном диапазоне долгот 30 ° E – 170 ° E (в основном над станциями GNSS в Антарктиде). , а также в сетях Новой Зеландии и Австралии и на островах в Тихом океане).Такое ограниченное покрытие в южном полушарии не позволяет отобразить всю картину поведения ионосферных неоднородностей с помощью карт ROTI с разрешением 1 ч с такой детализацией, как в северном полушарии. Несмотря на это ограничение, 1-часовые карты ROTI четко показали эволюцию зоны ионосферных неоднородностей во времени. Рисунок 5b демонстрирует возникновение узкой овальной или кольцевой структуры вокруг геомагнитного полюса в 16 UT, а затем эта зона расширилась и охватила весь континент Антарктида (20 UT).Далее зона неоднородностей расширилась к экватору и достигла Новой Зеландии и Южной Австралии с гораздо меньшими значениями ROTI около южного магнитного полюса (рис. 5c, 04 UT). В целом эволюция овала неровностей довольно похожа на эволюцию, наблюдаемую в северном полушарии. Однако следует учитывать сезонные (от зимы к лету) различия между полушариями. Лаундал и Остгаард (2009) объясняют эту асимметрию в терминах межполушарных течений, связанных с сезонами: ожидается, что разница в проводимости ионосферы вызовет разную интенсивность полярных сияний в двух полушариях, а также когда ММП имеет значительные Bx и By. составная часть.Все эти условия наблюдались во время геомагнитной бури 22–23 июня.
Меридиональные срезы объединенных карт GPS и ГЛОНАСС ROTI
Для сравнения временной эволюции ионосферных неоднородностей, вызванных бурей во время геомагнитной бури 22–23 июня 2015 г., мы выбрали наиболее репрезентативные и данные охватывали долготные секторы. в обоих полушариях и проанализировали меридиональные срезы карт GPS и ГЛОНАСС ROTI. Для увеличения временного разрешения мы рассчитали карты ROTI с частотой дискретизации 15 минут вместо 1 часа, как представлено в разделе «Двумерные комбинированные карты ROTI GPS и ГЛОНАСС».На рисунке 6 показано сравнение индексов SYM-H (разрешение 1 мин Dst) и аврорального электроджета (AE) с меридиональными срезами возмущений ROTI, оцененными вдоль следующих долгот: 85 ° з.д. в Северной Америке, 20 ° в.д. в Европе. , 70 ° з.д. в Южной Америке и 150 ° в.д. в австралийском секторе в спокойный день 20 июня и два возмущенных дня 22–23 июня 2015 г. Меридиональные срезы построены как среднее значение возмущений ROTI в диапазоне ± 5 ° вокруг выбранной географической долготы и отображается как функция географической широты и времени.Мы рассматриваем диапазон географических широт 30–90 ° в обоих полушариях. Левая вертикальная ось на рис. 6b – e показывает географические широты, а правая ось показывает соответствующие скорректированные геомагнитные широты. Необходимо отметить, что из-за различия геомагнитного и географического полюсов меридиональные срезы на рис. 6б, д пересекали широту геомагнитного полюса.
Рис. 6Сравнение a индексов SYM-H и AE с разрешением 1 мин и возмущений ROTI с разрешением 15 мин в зависимости от географической широты и времени, оцененных вдоль b 85W в Северной Америке, c 20E в Европе, d 70W в Южной Америке и e 150E в австралийском секторе в течение 20 и 22–23 июня 2015 г.Левая вертикальная ось для графиков b — e показывает географические широты, правая ось — соответствующие скорректированные геомагнитные широты
.Для спокойного дня 20 июня 2015 г. меридиональные срезы карт ROTI северного полушария, показанные на рис. 6b – e, показали наличие ионосферных неоднородностей на высоких широтах только в пределах 70–80 ° MLAT (близко к области каспа). ) в американском и австралийском секторах, вероятно, вызванных выпадением мягких частиц.Первый заметный пик в распределении неоднородностей, рассчитанных по ROTI, был выявлен после ~ 06 UT 22 июня 2015 г. во всех рассмотренных широтных секторах. Этот период соответствовал второму приходу CME в 05:45 UT, быстрым изменениям индекса SYM-H и первому усилению авроральной активности, представленного увеличением индекса AE на ~ 1300 нТл (см. Рис. 6а). Следующий пик ионосферных неоднородностей на высоких широтах наблюдался в 15-17 UT. Эти процессы были инициированы поворотом Bz ММП на юг и дальнейшим усилением авроральной активности, когда AE поднялась до ~ 1340 нТл, а SYM-H упала до -70 нТл.В этот период ионосферные неоднородности также регистрировались одновременно к экватору, как 70 ° MLAT в Северной Америке и 65 ° MLAT в Европе (рис. 6b, c).
Наиболее интенсивные неоднородности в высоких и средних широтах обнаружены в 18-22 UT 22 июня, что связано с новым периодом повышенной авроральной активности с двумя пиками индекса AE ~ 2180 и ~ 2700 нТл в 18:49 и 20:10 UT соответственно. В течение этого периода SYM-H увеличился до +88 нТл и быстро упал до значения -139 нТл с резкой скоростью изменения около -130 нТл / ч.В результате в этот период были обнаружены высокоширотные неровности в направлении к экватору, например, 54 ° MLAT в Северной Америке и 45 ° MLAT в Европе. В южном полушарии их сигнатуры простирались к экватору до -55 ° MLAT в Южной Америке и -50 ° MLAT в австралийском секторе (рис. 6d, e). Кроме того, мы обнаружили, что изображения с прибора SSUSI на борту четырех спутников DMSP (доступны по адресу http://ssusi.jhuapl.edu/data/edr-aur-anim//years/2015/173/EDR-AUR_LBHS_2015173.gif и помещены как Дополнительный файл 4: S4) выявил усиление авроральной активности 22 июня 2015 г. и расширение зоны полярных сияний к экватору до 50 ° MLAT в 18-22 UT.
Во время развития второй основной фазы (01: 50–05: 40 UT 23 июня) интенсивные ионосферные неоднородности регистрировались непрерывно в течение более длительного периода (4–5 ч) и охватывали широтный диапазон от полярного моря. области до 55 ° MLAT в обоих секторах северного полушария (рис. 6b, c) и до −50 ° MLAT в южном полушарии (рис. 6d, e). Таким образом, сигнатуры ионосферных неоднородностей, которые были зарегистрированы сигналами GPS и ГЛОНАСС и проанализированы с использованием подхода меридионального среза, выявляют сильную связь их интенсивности и экваториального пространственного расширения с усилением авроральной активности, в частности представленной АЭ. и индексы SYM-H.Подобный анализ в широтно-временной области позволяет оценить основные зависимости возникновения ионосферных неоднородностей, их дальнейшего развития и эволюции от движущих сил космической погоды. Будущие исследования, основанные на этих подходах, позволят формализовать эти зависимости в виде эмпирической модели ионосферных неоднородностей.
Можно резюмировать, что, несмотря на беспрецедентно большое количество станций, развернутых по всему миру в течение последних 5–10 лет, высокоширотные регионы (выше 60 ° MLAT) в обоих полушариях демонстрируют довольно редкое покрытие наземными системами GPS и ГЛОНАСС. наблюдения по сравнению со средними широтами.С другой стороны, сегодня наземный сегмент GNSS является единственным источником данных, способным обеспечить наземные наблюдения с нескольких пунктов с наилучшим глобальным охватом.
В этой статье мы расширяем возможности использования карт ROTI для анализа распределения ионосферных неоднородностей. Мы демонстрируем, что меридиональные срезы карт ROTI могут быть эффективно использованы для изучения возникновения и временной эволюции ионосферных неоднородностей в выбранных географических регионах в спокойные и особенно геомагнитно возмущенные периоды.Меридиональные срезы географических секторов, характеризующиеся высокой плотностью измерений GPS и ГЛОНАСС, могут представлять пространственно-временную динамику интенсивных неоднородностей плотности ионосферной плазмы с высоким разрешением и могут быть использованы для детального изучения факторов космической погоды, влияющих на процессы генерация ионосферных неоднородностей, их эволюция и время жизни.
Подчеркнем, что сочетание сигналов GPS и ГЛОНАСС позволяет существенно увеличить количество каналов трансионосферных измерений в мире.В результате это позволяет улучшить качество мониторинга ионосферных неоднородностей в обоих регионах с разреженным или плотным постоянным покрытием сети GNSS. В случае разреженных сетей (например, Северная Канада и Россия, регион Антарктиды и прибрежная зона в полярных регионах) объединение измерений на основе ГЛОНАСС, из-за другой конфигурации созвездия по сравнению с конфигурацией GPS, позволяет заметно расширить области покрываются измерениями GNSS и существенно увеличивают количество доступных точек проникновения в ионосферу.Особые преимущества данных ГЛОНАСС на высоких широтах могут заключаться в более раннем или лучшем обнаружении ионосферных возмущений, связанных с физическими процессами в авроральной области и полярной шапке, в частности, за счет комбинации с другими приборами, такими как совместные магнитометры, камеры всего неба и когерентные радары. Как видно на рис. 4, области высоких и средних широт в американском и европейском секторах хорошо охвачены комбинированными измерениями GPS и ГЛОНАСС без каких-либо значительных пробелов «нет данных».Для регионов с плотной сетью GNSS дополнительное использование данных ГЛОНАСС увеличило бы количество доступных измерений в 1,5–2 раза по сравнению с только GPS — например, для европейского региона мы можем получить ~ 1,700,000– 1,800,000 IPP за 1 час. Таким образом, мы потенциально можем построить региональные карты ROTI с беспрецедентно высоким разрешением до 0,5 ° × 0,5 ° по географической широте и долготе. Такие подробные карты ROTI уже успешно использовались для обнаружения ионосферных неоднородностей, связанных с индуцированными бурями сигнатурами истощения плазмы в Европе (Черняк, Захаренкова, 2016b).
Другие глобальные навигационные спутниковые системы (GNSS)
На этой странице:
На других страницах:
Глобальная навигационная спутниковая система (GNSS) — это общий термин, описывающий любую спутниковую группировку, которая предоставляет услуги позиционирования, навигации и синхронизации (PNT) на глобальной или региональной основе.
Хотя GPS является наиболее распространенной GNSS, другие страны используют или уже используют свои собственные системы для обеспечения дополнительных, независимых возможностей PNT.Основные из них описаны ниже.
GNSS также может относиться к системам дополнений, но их слишком много, чтобы перечислять их здесь.
Некоторые ссылки ниже ведут на внешние веб-сайты, которые не контролируются правительством США. Ссылки предоставляются в информационных целях и не означают одобрения правительством США каких-либо иностранных систем, услуг или мнений.
Навигационная спутниковая система BeiDou (BDS)
BeiDou, или BDS, является региональной GNSS, принадлежащей и управляемой Китайской Народной Республикой.Китай в настоящее время расширяет систему, чтобы к 2020 году обеспечить глобальное покрытие с помощью 35 спутников. Ранее BDS называлась Compass.
Подробнее:
Галилео
Galileo — это глобальная GNSS, принадлежащая и управляемая Европейским Союзом. ЕС объявил о запуске Galileo Initial Services в 2016 году и планирует завершить систему из 24+ спутников к 2020 году.
Подробнее:
ГЛОНАСС
ГЛОНАСС ( Глобальная навигационная спутниковая система , или Глобальная навигационная спутниковая система) является глобальной GNSS, принадлежащей и эксплуатируемой Российской Федерацией.Полностью действующая система состоит из 24+ спутников.
Подробнее:
IRNSS — это региональная GNSS, принадлежащая и управляемая правительством Индии. IRNSS — это автономная система, предназначенная для покрытия индийского региона и 1500 км вокруг материковой части Индии. Система состоит из 7 спутников и должна быть объявлена работающей в 2018 году.В 2016 году Индия переименовала IRNSS в Индийское навигационное созвездие (NavIC, что означает «моряк» или «навигатор»).
Подробнее:
Квазизенитная спутниковая система (QZSS)
QZSS — это региональная GNSS, принадлежащая правительству Японии и управляемая QZS System Service Inc. (QSS). QZSS дополняет GPS для улучшения покрытия в Восточной Азии и Океании. Япония планирует к 2018 году иметь действующую группировку из 4 спутников и расширить ее до 7 спутников для автономной работы к 2023 году.
Подробнее:
Что такое ГЛОНАСС? — все RF
ГЛОНАСС или Глобальная навигационная спутниковая система — это разработанная Россией спутниковая навигационная система, состоящая из 24 спутников в трех орбитальных плоскостях с восемью спутниками в каждой плоскости. Россия начала разработку ГЛОНАСС в 1976 году как экспериментальную систему военной связи. В 1982 году они запустили первый спутник ГЛОНАСС, а в 1995 году группировка стала полностью функциональной.
Спутники выводятся на условно круговые орбиты с наклоном цели 64,8 градуса и радиусом орбиты 19 140 км, что примерно на 1060 км меньше, чем у спутников GPS, с периодом обращения 11 часов 15 минут.
Версии ГЛОНАСС:
- ГЛОНАСС — Эти спутники были запущены в 1982 году для военных и официальных организаций. Они предназначались для измерения погоды, определения местоположения, времени и скорости.
- ГЛОНАСС-М — Эти спутники были запущены в 2003 году для добавления второго гражданского кода, который важен для картографических приемников ГИС.
- ГЛОНАСС-К — Эти спутники были запущены в 2011 году для добавления третьей гражданской частоты. Они бывают трех типов — К1, К2 и КМ.
- ГЛОНАСС-К2 — Эти спутники будут запущены после 2015 года (в настоящее время на стадии проектирования).
- ГЛОНАСС-КМ — Эти спутники будут запущены после 2025 года (в настоящее время на стадии исследований).
В настоящее время в эксплуатации находятся спутники ГЛОНАСС-М второго поколения, а также спутники ГЛОНАСС-К1, а спутники ГЛОНАСС-К2 и КМ находятся в стадии разработки.Сигналы ГЛОНАСС имеют ту же поляризацию (ориентацию электромагнитных волн), что и сигналы GPS, и имеют сопоставимую мощность сигнала.
Каждый спутник ГЛОНАСС передает C / A-код для стандартного позиционирования на частоте L1 и P-код для точного позиционирования на L1 и L2. P-код доступен только для военных целей. В отличие от GPS и Galileo, ГЛОНАСС использует разные частоты для каждого спутника.
Щелкните здесь, чтобы просмотреть диапазоны частот ГЛОНАСС.
ГЛОНАСС GPS: разница между обоими
Позвольте нашим опытным сотрудникам помочь вам найти продукты, соответствующие вашим уникальным потребностям в GNSS!
ГЛОНАСС GPS: в чем разница между ними?
Глобальная навигационная спутниковая система (GNSS) включает в себя группировки спутников, вращающихся над земной поверхностью и непрерывно передающих сигналы, которые позволяют пользователям определять свое местоположение. ГЛОНАСС GPS — это примеры созвездий GNSS.
Глобальная система позиционирования (GPS) относится к системе глобального позиционирования NAVSTAR, группе спутников, разработанной Министерством обороны США (DoD). Первоначально система глобального позиционирования была разработана для использования в военных целях, но позже стала доступной и для гражданского населения. В настоящее время GPS является наиболее широко используемой группировкой спутников GNSS в мире, и ее сеть из более чем 30 спутников и 6 орбитальных плоскостей обеспечивает непрерывную информацию о местоположении и времени во всем мире при любых погодных условиях.
ГЛОНАСС — это аббревиатура от Globalnaya Navigazionnaya Sputnikovaya Sistema; В переводе с русского это означает «Глобальная навигационная спутниковая система». ГЛОНАСС в настоящее время эксплуатируется Воздушно-космическими силами обороны России и обеспечивает определение местоположения и скорости в реальном времени как для военных, так и для гражданских целей. Развитие ГЛОНАСС началось в 1976 году в Советском Союзе и было восстановлено и завершено в начале 2000-х годов, когда это стало главным государственным приоритетом. Сегодня ГЛОНАСС имеет сеть из 24 спутников с 3-мя орбитальными плоскостями, которые покрывают не только 100% территории России, но и Землю в целом.
ГЛОНАСС Сравнение характеристик GPS
В настоящее время нет серьезных различий между двумя системами, когда речь идет о функциях, глобальном охвате или точности. Однако орбита ГЛОНАСС делает ее более пригодной для использования в северном полушарии, чем в южном полушарии, из-за большего количества наземных станций в этих местах. Наиболее существенное различие между ГЛОНАСС / GPS — способ связи с приемниками.При использовании GPS спутники используют одни и те же радиочастоты, но имеют разные коды для связи, в то время как спутники ГЛОНАСС имеют одинаковые коды, но используют разные частоты, что позволяет спутникам на одной орбитальной плоскости связываться друг с другом.
Хотя ГЛОНАСС изначально создавался как альтернатива GPS, сейчас мы видим основные преимущества одновременной работы двух систем, а не независимо друг от друга, для обеспечения точного определения местоположения в любой точке Земли. Включение всех 55 спутников, доступных по всему миру, в систему ГЛОНАСС GPS обеспечивает гораздо большую точность, особенно в городских каньонах.
Ознакомьтесь с продуктами TransiTiva
В чем разница между 5 созвездиями GNSS?
Прежде чем мы углубимся в различия между 5 созвездиями GNSS … Важно, что мы все на одной странице с различием между GNSS и GPS.
Многие люди путают технологии GNSS и GPS. Хороший способ думать о глобальных навигационных спутниковых системах (GNSS) — это как основа (или основная технология), лежащая в основе GPS.Глобальная система позиционирования (GPS) GPS — это созвездие GNSS, но GNSS не всегда является GPS. GPS — одна из 5 группировок GNSS, используемых во всем мире.
Пять группировок GNSS включают GPS (США), QZSS (Япония), BEIDOU (Китай), GALILEO (ЕС) и ГЛОНАСС (Россия). В этом посте мы подробно рассмотрим каждое из этих созвездий.
Основная причина появления всех 5 спутниковых группировок — доступность и избыточность. Если одна система выйдет из строя, ее может заменить другая группировка GNSS.Системные сбои случаются не часто, но приятно знать, что есть варианты резервного копирования.
Так в чем разница между этими 5 созвездиями? Рассмотрим каждую подробнее …
1. GPS
GPS — пионер в мире GNSS. Это самая старая система GNSS, которая начала работать в 1978 году и стала доступной для глобального использования в 1994 году.
GPS был изобретен из-за потребности в независимой военной навигационной системе. Министерство обороны США первым осознало это.В системе использовалось много сложностей, чтобы обеспечить высокую точность, а также защитить ее от попыток подмены и спуфинга. Позднее в будущем был обнародован GPS.
GPS работает в диапазоне частот, называемом L-диапазоном, частью радиоспектра от 1 до 2 ГГц. L-Band был выбран по нескольким причинам, в том числе:
- Ионосферная задержка более значительна на более низких частотах
- Упрощение конструкции антенны
- Свести к минимуму влияние погоды на распространение сигнала GPS
Сегодня GPS — самая точная навигационная система в мире.В спутниках GPS последнего поколения используются рубидиевые часы с точностью до ± 5 частей из 10 11 . Эти часы синхронизируются еще более точными наземными цезиевыми часами.
2. QZSS
Квазизенитная спутниковая система (QZSS) — это региональная спутниковая система из Японии, которую иногда называют «японской GPS».
QZSS в настоящее время использует одну геостационарную спутниковую орбиту и три на орбите QZO (наклонная, слегка эллиптическая, геостационарная орбита).
Система хронометража QZSS первого поколения (TKS) будет основана на рубидиевых часах. Однако первые спутники QZSS будут нести базовый прототип экспериментальной системы синхронизации кварцевых часов. Технология TKS — это новая спутниковая система хронометража, которая не требует бортовых атомных часов и используется в существующих навигационных спутниковых системах, таких как системы GPS, ГЛОНАСС и Galileo. Это позволяет системе работать оптимально, когда спутники находятся в прямом контакте с наземной станцией, что делает ее отличным решением для группировки QZSS.
Большим преимуществом QZSS является то, что он совместим с GPS. Это обеспечивает достаточное количество спутников для стабильного и высокоточного позиционирования.
3. BEIDOU
BEIDOU — это китайская спутниковая навигационная система, состоящая из двух отдельных спутниковых группировок, BeiDou-1 и BeiDou-2 (и скоро BeiDou-3) …
Источник: China Daily
BeiDou-1
BeiDou-1 (также известная как экспериментальная система спутниковой навигации BeiDou) состоит из трех спутников, предлагающих ограниченные навигационные услуги и зону покрытия.В основном он использовался пользователями в Китае и соседних регионах. BeiDou-1 выведен из эксплуатации в конце 2012 года.
BeiDou-2
BeiDou-2 (иногда называемый КОМПАС) — второе поколение системы. Он начал работать в декабре 2011 года с частичной группировкой из 10 спутников. Он предоставляет услуги клиентам в Азиатско-Тихоокеанском регионе с конца 2012 года.
BeiDou-3
China приступила к созданию своего третьего поколения системы BeiDou-3 в 2015 году.На этот раз … для глобального освещения.
По состоянию на октябрь 2018 года на орбите находится 15 спутников. Цель состоит в том, чтобы к 2020 году вывести на орбиту 35 спутников, которые по завершении будут предоставлять глобальные услуги.
После запуска и эксплуатации BeiDou-3 станет альтернативой американским GPS, ГЛОНАСС или GALILEO. Ожидается, что BeiDou-3 будет еще более точным с точностью до миллиметра (с постобработкой).
Интересный факт: По данным China Daily, в 2015 году (через пятнадцать лет после запуска системы BeiDou-1) оборот компании составил 31 доллар.5 миллиардов в год для крупных компаний, таких как China Aerospace Science and Industry Corp, AutoNavi Holdings Ltd и China North Industries Group Corp.
4. ГАЛИЛЕО
GALILEO — европейская система GNSS, совместимая с GPS и ГЛОНАСС. Он начал предоставлять услуги в декабре 2016 года.
ПриемникиGALILEO отслеживают положение спутниковой группировки в так называемой «опорной системе GALILEO», используя спутниковую технологию и принципы триангуляции.
Система Galileo разделена на три основных сегмента…
- Космос
- Земля
- Пользователь
Функция космического сегмента состоит в генерации и передаче сигналов кода и фазы несущей с определенной структурой сигнала Galileo. Он также сохраняет и повторно передает навигационные данные, отправленные наземным сегментом.
Наземный сегмент является основным элементом системы, который управляет всей группировкой, включая средства навигационной системы и службы распространения.Наземный сегмент состоит из:
- Два наземных центра управления (GCC)
- Сеть телеметрии
- Станции слежения и контроля (TT&C)
- Сеть миссий восходящих станций (ULS)
- Сеть сенсорных станций Galileo (GSS)
Пользовательский сегмент состоит из приемников GALILEO. Основная цель здесь — отслеживать координаты спутниковой группировки и обеспечивать очень точное время. Это делается, конечно, путем приема сигналов Galileo, определения псевдодальности (и других наблюдаемых) и решения навигационных уравнений.
Ожидается, чтоGALILEO выйдет на полную работоспособность (FOC) к 2020 году.
5. ГЛОНАСС
Наконец, ГЛОНАСС — это российская версия GPS. Разработка началась в 1976 году Советским Союзом. Всего существует 5 версий ГЛОНАСС, в том числе:
- ГЛОНАСС (1982)
- ГЛОНАСС-М (2003)
- ГЛОНАСС-К (2011)
- ГЛОНАСС-К2 (2015)
- ГЛОНАСС-КМ (2025 г. — в фазе исследований)
Вспомогательный ГЛОНАСС
Ассистированный ГЛОНАСС (A-GLONASS) во многом аналогичен ГЛОНАСС, но имеет больше функций для смартфонов.Эти функции включают в себя пошаговую навигацию, данные о загруженности дорог в реальном времени и многое другое. А-ГЛОНАСС использует близлежащие вышки сотовой связи, чтобы быстро определить ваше точное местоположение. Также улучшена производительность чипсетов с поддержкой ГЛОНАСС.
Разница между ГЛОНАСС и GPS GNSS
Во-первых, сеть GPS США включает 31 спутник, а ГЛОНАСС использует 24 спутника. Две системы также несколько различаются по точности. Точность определения местоположения ГЛОНАСС составляет 5-10 м, а GPS — 3,5-7.8м. Следовательно, точность GPS превосходит ГЛОНАСС, поскольку меньшее количество ошибок лучше.
Что касается частот, то ГЛОНАСС работает на частоте 1,602 ГГц, а GPS — на частоте 1,57542 ГГц (сигнал L1).
При использовании отдельно ГЛОНАСС не обеспечивает такое сильное покрытие по сравнению с GPS. На самом деле существенных преимуществ ГЛОНАСС перед GPS нет.
ГЛОНАСС — отличный помощник для GPS. Когда сигналы GPS теряются (например, когда вы находитесь между высокими зданиями), ГЛОНАСС прикрывает вас.
Что общего у всех созвездий GNSS?
Короткий ответ — потребность в точном времени и точности.Обычно это достигается с помощью высокопроизводительных атомных часов с рубидием или спутниковых GPSDO LEO. Здесь, в Bliley Technologies, мы применили более чем 85-летний опыт управления частотой, чтобы предоставить миру одни из лучших решений для синхронизации для созвездий GNSS и спутников LEO.
Вам обязательно стоит подумать о загрузке полной спецификации Hyas, нашего нового GPS-осциллятора с дисциплиной GPS (GPSDO), специально разработанного для спутников LEO и созвездий GNSS. Я думаю, тебе понравится то, что ты увидишь!
ГЛОНАСС | НовАтель
ГЛОНАСС (Глобальная навигационная спутниковая система, Россия)
ГЛОНАСС была разработана Советским Союзом как экспериментальная система военной связи в 1970-х годах.Когда закончилась «холодная война», Советский Союз признал, что ГЛОНАСС имеет коммерческое применение, благодаря способности системы передавать погодные радиопередачи, данные связи, навигации и разведки.
Первый спутник ГЛОНАСС был запущен в 1982 году, и система была объявлена полностью работоспособной в 1993 году. После периода, когда характеристики ГЛОНАСС ухудшались, Россия взяла на себя обязательство довести систему до требуемого минимума в 18 активных спутников. В настоящее время ГЛОНАСС имеет 24 спутника в группировке.
спутника ГЛОНАСС эволюционировали с момента запуска первых. Последнее поколение ГЛОНАСС-М показано на рис. 30 . готовится к запуску.
Проектирование системы ГЛОНАСС
Созвездие ГЛОНАСС обеспечивает видимость различного количества спутников в зависимости от вашего местоположения. Наличие минимум четырех спутников в поле зрения позволяет приемнику ГЛОНАСС вычислять свое положение в трех измерениях и синхронизировать с системным временем.
Космический сегмент ГЛОНАСС
Космический сегмент ГЛОНАСС представлен в таблице 4 .
Таблица 4: Спутниковая группировка ГЛОНАСС
| Спутники | 24 плюс 3 запчасти |
| Орбитальные самолеты | 3 |
| Угол наклона орбиты | 64,8 градуса |
| Радиус орбиты | 19,140 км |
Космический сегмент ГЛОНАСС состоит из 24 спутников в трех орбитальных плоскостях, по восемь спутников в каждой плоскости.
Геометрия созвездия ГЛОНАСС повторяется примерно раз в восемь дней. Период обращения каждого спутника составляет приблизительно 8/17 звездных суток, так что за восемь звездных суток спутники ГЛОНАСС совершили ровно 17 орбитальных оборотов.
Каждая орбитальная плоскость содержит восемь равноотстоящих спутников. Один из спутников будет находиться в одной и той же точке неба каждый день в одно и то же звездное время.
Спутники выводятся на условно круговые орбиты с наклонением цели 64.8 градусов и радиус орбиты 19 140 км, что примерно на 1060 км меньше, чем у спутников GPS.
Спутниковый сигнал ГЛОНАСС идентифицирует спутник и включает:
- Информация о местоположении, скорости и ускорении для вычисления местоположения спутников.
- Спутниковая медицинская информация.
- Смещение времени ГЛОНАСС от UTC (SU) [всемирное координированное время, Россия].
- Альманах всех остальных спутников ГЛОНАСС.
«Земля была абсолютно круглой.. . Я никогда не знал, что означает слово «круглая», пока не увидел Землю из космоса ». Алексей Леонов, советский космонавт, рассказывает о своем историческом выходе в открытый космос в 1985 году.
Сегмент управления ГЛОНАСС
Сегмент управления ГЛОНАСС состоит из центра управления системой и сети станций слежения за командами по всей России. Сегмент управления ГЛОНАСС, аналогично сегменту GPS, контролирует состояние спутников, определяет поправки эфемерид, а также смещения спутниковых часов относительно времени ГЛОНАСС и UTC (всемирное координированное время).Дважды в день загружает поправки на спутники.
Сигналы ГЛОНАСС
Таблица 5 обобщает сигналы ГЛОНАСС.
Таблица 5: Характеристики сигнала ГЛОНАСС
| Обозначение | Частота | Описание |
| L1 | 1598,0625 — 1609,3125 МГц | L1 модулируется сигналами HP (высокая точность) и SP (стандартная точность). |
| L2 | 1242,9375 — 1251,6875 МГц | L2 модулируется сигналами HP и SP. Код SP идентичен тому, который передается на L1. |
Каждый спутник ГЛОНАСС передает на немного разных частотах L1 и L2, с P-кодом (код HP) как на L1, так и на L2, и кодом C / A (код SP) на L1 (все спутники) и L2 (большинство спутников). Спутники ГЛОНАСС передают один и тот же код на разных частотах, метод, известный как FDMA, для множественного доступа с частотным разделением каналов.Обратите внимание, что этот метод отличается от того, который используется в GPS.
СигналыГЛОНАСС имеют ту же поляризацию (ориентацию электромагнитных волн), что и сигналы GPS, и имеют сопоставимую мощность сигнала.
Система ГЛОНАСС основана на 24 спутниках, использующих 12 частот. Спутники могут совместно использовать частоты, имея противоположные спутники, передающие на одной и той же частоте. Спутники-антиподы находятся в одной орбитальной плоскости, но разнесены на 180 градусов. Спаренные спутники могут передавать на одной и той же частоте, потому что они никогда не появятся одновременно в поле зрения приемника на поверхности Земли, как показано на Рис. 32.
Модернизация ГЛОНАСС
По мере того, как срок службы существующих спутников ГЛОНАСС-М подходит к концу, они будут заменены спутниками ГЛОНАСС-К следующего поколения. Новые спутники обеспечат систему ГЛОНАСС новыми сигналами GNSS.
L3
Первый блок спутников ГЛОНАСС-К (ГЛОНАСС-К1) будет транслировать новый гражданский сигнал, обозначенный L3, с центральной частотой 1202,025 МГц. В отличие от существующих сигналов ГЛОНАСС, L3 основан на CDMA, что облегчит взаимодействие с GPS и Galileo.
Первый спутник ГЛОНАСС-К1 был запущен в феврале 2011 года.
L1 и L2 CDMA
Второй блок спутников ГЛОНАСС-К (ГЛОНАСС-К2) добавляет еще два сигнала на основе CDMA, транслируемых на частотах L1 и L2.